11.8. Особенности постановки задачи определения характеристик стохастической коррекции
В отличие от детерминированной коррекции, в рамках постановки которой можно ограничиться определением только конкретных значений вектора корректирующей скорости, предельных ошибок и энергозатрат на проведение коррекции, методика расчета стохастической коррекции в общем случае должна включать (38] в себя способы определения законов и параметров распределения соответствующих характеристик.
Существенным достоинством постановки задачи линейной стохастической коррекции является то, что при нормальном законе распределения ошибок управления при ее выполнении и навигационных измерений, используемых для определения орбиты, законы распределения характеристик коррекции, связанные с этими ошибками линейной зависимостью, также являются нормальными.
Однако даже в рамках наиболее широко распространенной (в силу ее простоты) схематизации, далеко не все характеристики линейной коррекции могут быть приняты подчиняющимися закону Гаусса. К их числу относят прежде всего энергетические затраты и ошибки исполнения, которые даже при принятии к рассмотрению линейной модели процесса коррекции связаны с предшествующими ошибками выведения, прогнозирования движения и функционирования бортовых систем нелинейными зависимостями.
Учитывая данное обстоятельство, задачу определения характеристик стохастической линейной коррекции обычно формулируют следующим образом.
Пусть выбраны корректируемые параметры и задана область их допустимых значений в пространстве корректируемых параметров.
Необходимо на основании заданной априорной информации об ошибках работы отдельных систем и принятой стратегии коррекции найти вероятностные характеристики генеральной совокупности параметров, определяющих управляемое движение: отклонение кинематических параметров, ошибки реализации корректируемых параметров, корректирующие скорости, энергетические затраты и т. д.
При исследовании стохастических коррекций, как правило, предполагают, что вид коррекций, время их проведения и коэффициенты связи (при связанной коррекции) являются едиными для всего множества возможных траекторий и не зависят от конкретных реализаций ошибок. Использование именно такой стратегии коррекции оправдано присущими траекториям межпланетного перелета свойствами эффективности коррекции, а также принятыми принципами управления полетом, согласно которым все необходимые работы по подготовке и формированию управляющего воздействия (проведение сеансов измерений, коррекций и др.) осуществляют по единому временному графику.
Таким образом, предполагается, что известны время проведения коррекций tj и матрицы связи С(tj), единые для всего множества терминальных параметров, соответствующего возможным ошибкам выведения, прогнозирования параметров движения и проведения коррекций.
Многообразие видов управляющих воздействий и условий, накладываемых на корректируемые параметры, привело, как было отмечено ранее, к созданию различных трудоемких методов расчета характеристик параметров управления, предназначенных для конкретного типа управления. Поэтому целесообразно использовать метод расчета, охватывающий наиболее часто встречающуюся совокупность видов и типов управляющих воздействий и наилучшим образом приспособленный к программной реализации.
Такой метод должен базироваться на свойстве эквивалентности исходной задачи g-импульсной одноразовой коррекции последовательности задач, в каждой из которых определяют характеристики управления для минимального числа управляющих воздействий, обеспечивающих заданное изменение вектора отклонений корректируемых параметров [38].
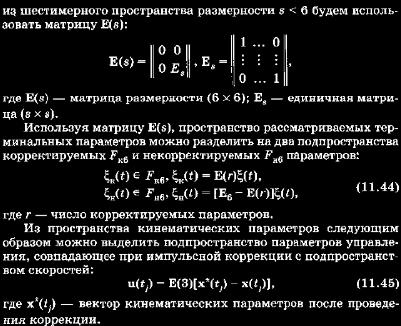
В рамках указанного метода предполагают, что число коррекций и время их проведения заданы, необходимо найти только u(tj). Введем два шестимерных евклидовых пространства — кинематических и терминальных параметров. Для выделения из шестимерного пространства размерности s < 6 будем использовать матрицу E(8):
Учитывая сложность и громоздкость соответствующих выкладок, ограничимся здесь приведенным выше обсуждением рассмотренной постановки задачи [38].
|