15.4. Управление СА на гиперболических траекториях возвращения
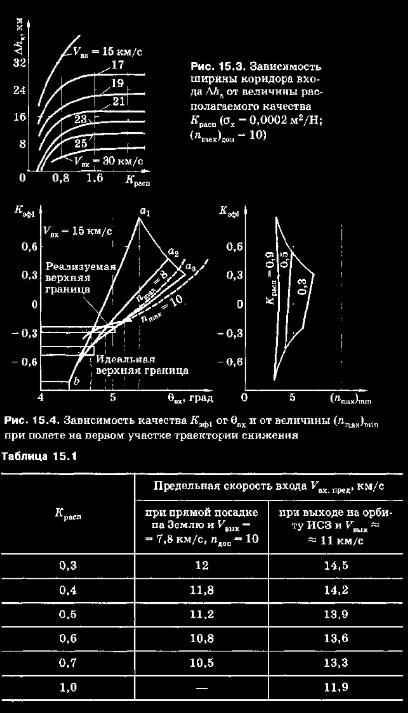
Наиболее простым и надежным способом управления СА при движении в атмосфере является управление путем изменения угла крена при постоянном значении угла атаки (управление «эффективным» качеством). С увеличением скорости входа для получения необходимого рабочего коридора входа необходимо увеличивать располагаемое качество. Но, как видно из рис. 15.3, по крайней мере до скоростей входа VBX ~ 19 км/с с баллистической точки зрения вполне возможно использовать аппараты, управляемые с помощью изменения угла крена. Это будем иметь в виду при дальнейших рассуждениях.
Обеспечение точной и безопасной посадки КА в большой степени определяется возможностями управления аппаратом в пределах коридора входа. При решении указанной задачи целесообразно применять метод разделения траектории снижения на несколько характерных участков.
Первым участком является участок от точки входа КА в плотные слои атмосферы до точки достижения максимальной перегрузки. На втором участке выдерживаются требуемые физические ограничения на движение аппарата, в частности, ограничения по суммарной перегрузке, высоте полета, максимально допустимой температуре на поверхности КА и т. д. На последнем участке обеспечивается удовлетворение заданных условий в конце полета — по скорости, высоте, дальности. Такой путь разделения траектории позволяет достаточно просто, всесторонне и тщательно проанализировать как отдельные участки, так и траекторию снижения в целом.
Первый участок непродолжителен по времени и малоэффективен для цели гашения скорости. Скорость движения КА на этом участке уменьшается всего на 0,6...3 км/с (меньшие значения характерны для больших скоростей входа).
Одной из основных задач, которые должны быть решены системой управления спуском на этом участке, является уточнение траектории снижения и получение достаточной информации для обеспечения условий как по захвату КА атмосферой, так и по перегрузочному режиму. Малая продолжительность полета КА на первом участке и значительная инерционность аппарата существенно влияют на выбор программы управления — практически целесообразным является полет с постоянным углом крена.
С момента достижения аппаратом максимальной перегрузки начинается второй участок, который является основным для торможения и гашения скорости СА. Среди возможных номинальных траекторий, которые целесообразно использовать на этом участке, наиболее рациональными можно считать изоперегрузочные траектории. Режим полета СА с постоянной перегрузкой обеспечивает минимальное время торможения и гашения избытка скорости аппарата.
Торможение СА на втором участке рационально организовать так, чтобы к моменту его окончания величина и направление вектора скорости, а также высота полета приблизительно соответствовали тем величинам, которые получают в момент первого максимума перегрузки при входе СА в атмосферу с параболической скоростью.
Третий участок траектории снижения СА по характеру решаемых задач и по условиям снижения подобен участку траектории при входе СА со второй космической скоростью после прохождения максимума перегрузок. В качестве номинальных программ управления на третьем участке можно использовать программы с постоянным углом крена.
На рис. 15.4 показаны границы коридора входа при использовании этих номипальиых программ управления.
Кривые слева показывают зависимость потребного эффективного качества Кэф на первом участке от угла входа при реализации минимальных перегрузок. При входе СА с углом 6ВХ, соответствующим какой-либо точке a, (i = 1, 2,3) на первом участке, необходимо осуществлять снижение с соответствующим значением К^ , > 0 (0,9, или 0,5, или 0,3) при последующем переходе на полностью отрицательное качество -Красп. Если же угол 0,х находится на линии ар, то в начале полет происходит с найденным значением К^,, а затем в точке достижения максимума перегрузки необходимо переходить на значение качества -ЛГрасг1. Пунктирные линии аналогичны кривым ар, но для них характерны другие значения максимальной перегрузки.
Кривые в правой части рис. 15.4 характеризуют минимально реализуемые значения максимальных перегрузок.
Для гиперболических скоростей входа при использовании номинальных траекторий с К = const скорость на выходе из плотных слоев атмосферы после первого погружения (даже при движении СА по нижней границе коридора входа) может значительно превышать вторую космическую. Это означает, что при программе управления К - const и соблюдении требуемых ограничений по максимальной перегрузке обеспечить конечные условия посадки невозможно.
Определим скорости входа, при которых существует принципиальная возможность использовать номинальные траектории снижения с К = const. Рассмотрим траектории снижения, для которых максимально допустимой перегрузкой является перегрузка, равная 10. Скорость вылета КА из атмосферы после первого прохождения плотных слоев зависит от значения располагаемого качества, причем величина Уаыл увеличивается с увеличением значения качества. В табл. 15.1 приведены предельные скорости входа Увх пред (для различных значений качества -Краеп), определяющие допустимые области использования программ управления К - const.
Как следует из данных табл. 15.1, использовать номинальные траектории с постоянным значением качества (К = const) нецелесообразно и в ряде случаев невозможно при ограничении на максимально допустимую перегрузку (птах)аоп = 10. Однако это не исключает применения подобной программы управления на некоторых участках спуска.
|