15.6. Описание алгоритма работы СУС на гиперболических траекториях
При реализации алгоритма управления работы СУС необходимо решить три системы уравнений. Первая система описывает реальное движение СА. С ее помощью получают ускорения, действующие на аппарат в процессе снижения. При этом используют угол крена •flf), который формируется в результате работы СУС с учетом динамики движения СА около центра масс. Полученные при решении первой системы значения перегрузок используют во второй системе, которая предназначена для определения текущего вектора фазового состояния СА. При этом также учитывают ошибки в начальных данных и погрешности, возникающие при бортовых вычислениях и в результате работы органов управления.
Значение угла крена у, удовлетворяющее текущим условиям (например, выводу СА в область допустимых максимальных перегрузок), определяют при решении третьей системы. При этом используют прогноз текущего значения качества и величины рах. Осуществляют эго следующим образом. В некоторый момент времени f, _ j находят два значения суммарной перегрузки — текущее (по данным акселерометров) и расчетное (из решения третьей системы). Принято, что их отношение = отличается от единицы только в результате возникновения ошибки при определении плотности атмосферы и ошибки в значении ...
При решении третьей Системы используют значение
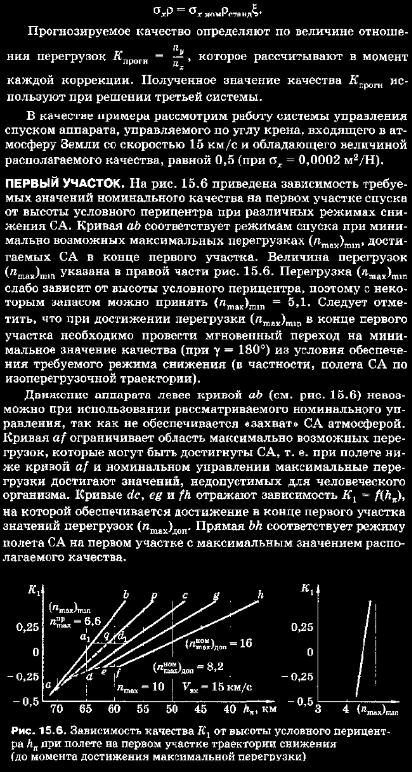
Итак, зона abed является номинальной рабочей зоной. Верхняя граница коридора входа соответствует высоте условного пери-центра ft® = 70,6 км, а нижняя (номинальная) — высоте ft" = 47 км. Величина коридора входа составляет (ДАЯ)Я0М =■ 23,6 км.
Из рис. 15.6 следует, что чем ниже (по высоте условного перицентра, но в пределах допустимой зоны) СА входит в атмосферу, тем шире зона по AhK, в которой возможно движение с постоянным значением качества К1 (без какой-либо коррекции на первом участке). Действительно, в диапазоне высот А„ = 58...47 км для обеспечения условий в конце первого участка СА должен двигаться с = 0,5, которому соответствует величина hK — 52,5 км и допустим разброс ДЛ„ = +5,5 км. При изменении К{ на величину +0,08 соответствующий диапазон значений изменяется ня ±3 км. Предполагают, что непосредственно перед входом в плотные слои атмосферы высота перицентра подлетной траектории известна с точностью до ±3 км (линия а^ на рис. 15.6). Тогда снижение СА в зоне a^bedj^ отвечает наиболее благоприятным условиям для построения СУС, так как в этом случае на первом участке не требуется разрабатывать специальных законов управления. Указанная зона по высотам условного перицентра соответствует коридору входа Дhn = 18 км (от 46 до 64 км).
Как следует из рис. 15.6, запас по высоте условного перицентра составляет 6,6 км. Вход при значениях hK < 47 км приводит к незначительному увеличению максимальных перегрузок. Так. при Ля = 42 км величина птак » 10. В результате можно определить величину прицельной высоты перицентра траектории возвращения. Для СА с К?аап — 0,5 значение (Лл)приц составляет 56 км (при tfj = 0,3 и nmax = 6,6).
Линия pq на рис. 15.6 отражает зависимость необходимого номинального качества К1 на первом участке от величины условного перицентра В этом случае обеспечивается равный запас по управлению как на меньших, так и на больших высотах условного перицентра.
При hn > 60,5 км (точка q) начальное значение качества К1 равно -0,5. При дальнейшем движении СА это значение качества нужно корректировать в соответствии с текущими и прогнозируемыми условиями спуска.
Итак, на первом участке система управления спуском должна обеспечить выведение СА в зону действия максимальных перегрузок nmax = 6,6, что соответствует среднему уровню перегрузок. При этом допустим разброс значения лтах на величину по-рядкаДп = ±1,6.
Перед входом в плотные слои атмосферы осуществляют ориентирование СА: аппарат разворачивают на угол крена у, соответствующий требуемому значению качества (в зависимости от величины Л„). С этим значением угла крена СА снижается до момента времени ty. Можно принять ty = 30 с. Начиная с момента t = t (при необходимости) проводят коррекции качества (угла крена) с частотой Дгкор, необходимой для выведения С А в область требуемых максимальных перегрузок гаюах 6,6.
Поиск абсолютно точного максимума перегрузки лтах не является обязательным — на первом участке перегрузка монотонно возрастает (вплоть до максимума). При выполнении условия п, < д,_1 решение третьей системы прекращают, а значение n,_j принимают за максимальное. Чтобы избежать больших ошибок при определении nmax, целесообразно использовать переменный шаг интегрирования третьей системы: при перегрузках п < 3 шаг интегрирования составляет At„n = 3 с, а при п > 3 Д£Н(1 = 1 с.
Для решения краевой задачи, получаемой из общей задачи, можно применять любые (даже самые простые) способы. Действительно, при быстродействии бортовой ЦВМ порядка 10 ООО простых операций в секунду один просчет третьей системы от момента t до момента nmax (при суммарном времени не более 100 с) занимает менее 0,6 с, т. е. за время ДtK j = 6 с можно обеспечить требуемое число итераций (для выполнения конечных условий). ВТОРОЙ УЧАСТОК. После достижения максимума перегрузок следует увеличение текущего угла крена (т. е. уменьшение эффективного качества) для сохранения перегрузки nmax и для осуществления перехода на полет по изоперегрузочной траектории. Решение краевой задачи ведут на некотором конечном интервале времени, т. е. в момент времени tt_Y определяют значение угла крена 7треб, которое необходимо для момента и которое обеспечит попадание СА в область лзад в момент времени f, + j - t, + + дгпроги (дгпр0ги = 2 с).
Колебания величины перегрузки в пределах от (я|Пвх)т1П до '^тах'дап на данном участке не мешают выполнению основной задачи — гашению избытка скорости СА. Поэтому при решении краевой задачи должно выполняться единственное условие — обеспечение выхода СА в требуемую область с допустимым разбросом по перегрузке Дгазад = ±1.
При текущей скорости полета 10,5 км/с на втором участке начинают решение второй задачи — осуществляют прогноз движения СА при величине качества что необходимо для определения момента достижения заданных конечных условий спуска.
ТРЕТИЙ УЧАСТОК. Порядок проведения коррекций, прогнозирование плотности и значения качества на этом участке при полете по «протяженным» траекториям и по траекториям, на которых осуществляется выход на орбиту ИСЗ, подобны управлению на участке второго погружения при входе СА с параболической скоростью. В этом случае К^ 2 = 0, что обеспечивает равный запас по качеству. Для «коротких» траекторий условия выбора качества такие же, как и для участка второго погружения.
В целом описанный метод построения и алгоритм работы системы управления спуском достаточно универсален, является работоспособным в большом диапазоне значений VBX и Ярасп. Алгоритмическая и вычислительная реализация данного метода управления свидетельствует о его высокой эффективности при решении задачи точной посадки СА в требуемый район. Метод также является работоспособным при решении задачи спуска с переводом СА на орбиту ИСЗ (практически в границах всего предельного коридора входа).
|