Баллистика и навигация космических аппаратов
|
17.1. Эволюция функций и задач НАКУ; учет многоуровневой иерархии его структуры Отсчет начала теоретических исследований и базирующихся на них практических разработок в области создания НАКУ принято вести с конца 1956 г., когда в Институте ракетных войск Министерства обороны был создан эскизный проект КИК для первых советских искусственных спутников Яемли (ИСЗ). В результате проведенных исследований был определен состав КИКа, включающий: ► совокупность средств внешнетраекторных измерений (ВТИ), предназначенных для измерения параметров орбиты; ► комплекс средств приема с ИСЗ телеметрических данных; ► командно-программные радиолинии и совокупность средств связи; ► комплекс средств службы единого времени (СЕВ); ► информационный комплекс обработки и отображения получаемых данных. В процессе большого количества расчетов орбит и трасс ИСЗ, а также географического и экономического анализа возможных условий размещения НИП КИКа, были определены районы их дислокации на территории СССР. Отработку средств КИК начали еще до запуска первого ИСЗ в процессе пусков баллистических ракет дальнего действия (БРДД) при проведении их летно-конструкторских испытаний (ЛКИ). В штатной комплектации ЕСИК начал функционировать только с момента запуска третьего ИСЗ, на котором было размещено достаточно большое количество служебных систем и научных приборов, обеспечивающих выполнение весьма емкой программы геофизических исследований. Оперативные группы располагали на НИПах, разбросанных по всей территории СССР: от западных его границ до Камчатки. При этом стационарные (наземные) средства контроля и управления дополняли подвижными (плавучими) ИП в виде кораблей слежения, размещаемыми в акватории Мирового океана. Основные принципы и подходы к решению задач построения средств управления формировались еще в начале 60-х гг. XX в., в период осуществления первых пилотируемых полетов космических кораблей (КК) «Восток» и «Восход» и начала подготовки к ЛКИ КК «Союз». На следующем этапе осуществления космических полетов (1967—1971 гг.), характеризующемся ЛКИ КК «Союз» и подготовкой, а затем беспилотными полетами КК «Зонд» (предназначавшихся для пилотируемого облета Луны) они не изменились принципиально, но существенно увеличились объемы перерабатываемой информации. Это повлекло за собой необходимость автоматизации этих процессов и более полного обмена данными, получаемыми на различных НИПах. Очередной этап развития пилотируемых полетов (1971—1976 гг.), связанный с созданием и началом полетов орбитальных пилотируемых станций типа «Салют», подготовкой, а затем и ЛКИ модифицированного транспортного корабля (ТК) «Союз-Т», поставил перед управленцами новые задачи. Во-первых, претерпела изменение концепция развития бортового комплекса управления (БКУ), что особенно четко прослеживалось на примере КК «Союз-Т». Если раньше построение систем управления «Союзами» осуществляли на базе аналоговой техники (релейных и аналоговых устройств), то в составе БКУ «Союза-Т» уже появилась БЦВМ, т. е. осуществился переход к дискретным системам управления. При этом обеспечивалось и существенное расширение функций БКУ, на который возлагалось решение задач управления движением КК, контроля и диагностики приборов системы управления движением (СУД). Во-вторых, существенно расширились возможности средств передачи, централизованного сбора и обработки телеметрической информации. В-третьих, практическое воплощение получило использование для связи НИПов с ЦУПом спутниковых систем передачи информации на базе спутников связи типа «Молния». В этих условиях дальнейшее развитие комплекса управления полетами уже не требовало привязки ЦУПа к территории одной из станций слежения. Поэтому принимают решение о разработке, создании и вводе в строй специализированного ЦУПа в координационно-вычислительном центре (КВЦ) ЦНИИМАШ в г. Королеве Московской области. Последующий этап (1977—1985 гг.) ознаменован подготовкой и проведением полетов орбитальных комплексов (OIC) второго поколения «Салют-6» — «Союз» — «Прогресс», заменой пилотируемого транспортного корабля в структуре комплекса на «Союз-Т» и созданием комплекса «Салют-7» — «Союз-Т» — «Прогресс». Существенной содержательной особенностью этого этапа явилось перераспределение приоритетов в части разработки технических средств и математического обеспечения (МО) управления полетами в пользу последнего. При этом особое внимание было уделено вопросам создания в ЦУПе МО командно-программного управления и планирования полета, а также баллис-тико-навигационного обеспечения научных и прикладных исследований, проводимых на борту комплексов. Дальнейшее развитие это направление получило в рамках подготовки ЛКИ и в процессе последующего осуществления долговременного полета орбитального комплекса «Мира, относящегося к ОК третьего поколения. Создание и запуск автоматических беспилотных К А потребовали развития инфраструктуры наземного комплекса управления, которое осуществляли в значительной степени стихийно в соответствии со сложившимися взаимоотношениями организаций-разработчиков КА с организациями-разработчиками командно-измерительных систем и различными структурами существующего НАКУ. В связи с разработкой и созданием одиночвых КА и спутниковых систем нового типа, обращающихся по приполярным и геостационарным орбитам, потребовалось создание новых НИПов. В результате к началу 1990-х гг. для управления полетами КА различных типов было создано и использовалось около 20 НИПов и 5...7 региональных ЦУПов, объединенных исключительно сложной наземной, а впоследствии и спутниковой связью. В состав НАКУ входило также более 10 кораблей, оборудованных радиотехническими средствами измерений и связи с КА. С 1986 г. с целью увеличения зоны радиовидимости при управлении ОК «Мир» стали использовать ИСЗ-ретрансляторы типа «Луч». Это позволило отказаться от применения подвижных (плавучих) НИПов, обеспечило существенное повышение эффективности управления орбитальной группировкой, съема и передачи в центры обработки больших потоков целевой информации. Анализ динамики функционирования НАКУ немыслим без построения не только концептуальной, но и достаточно полной и корректной математической модели, адекватно отражающей свойства объекта моделирования. Практически единственно возможным подходом к построению математической модели НАКУ, относящегося к классу сложных многоуровневых иерархических систем, является использование информационно-кибернетического системного (ИКС) подхода. Ко всему тому следует учесть, что в структуре НАКУ присутствует объективно опытный образец КА, а в качестве элементов структуры в контурах управления различных иерархических уровней (наземного и бортового для пилотируемых КА) выступают операторы (псрсопал ЦУПа и летчики-космонавты). Данное обстоятельство характеризует систему как обладающую высоким уровнем априори неустранимой • неопределенности информации о ее текущем состоянии. Математическое моделирование динамики сложных технических систем (СТС), обладающих столь высоким уровнем сложности и неопределенности, как известно, возможно лишь при теоретико-множественном их описании, т. е. при использовании на начальной стадии достаточно абстрактных моделей [17, 64]. Хотя единого общепринятого понятия многоуровневой иерархии структуры не существует, обычно считают, что структура должна быть отнесена к классу обсуждаемых систем, если она характеризуется присутствием в ней следующих признаков: ► последовательного вертикального расположения подсистем, образующих данную систему; ► приоритетностью принятия решений и их реализацией подсистемами верхнего уровня по отношению к подсистемам, обладающим более низким уровнем иерархии; ► зависимостью функционирования подсистем верхнего уровня от фактического исполнения подсистемами более низкого уровня своих функций. Очевидно, что автоматизированный комплекс управления космическими полетами (АКУКП), включающий в себя наземный (НКУ) и бортовой (БКУ) контуры, в полной мере удовлетворяет указанным признакам, а следовательно, его можно с полным основанием отнести к числу структур указанного типа. К числу важнейших понятий, используемых при описании их функционирования, относят: иерархию целей, стратифицированные уровни описания, уровни сложности принимаемого решения, показатели и критерии эффективности. Цель функционирования АКУКП может быть обеспечена только посредством достижения целей ее отдельных компонентов, т. е. подсистем, входящих в ее состав. Обычно принято отождествлять цели подсистем (или подцели) как средства (соответствующие им задачи) достижения цели системы более высокого уровня. Другими словами, если цель системы j-го уровня иерархии Qj, то цели систем более низкого уровня Qj _ L будут представлять собой средства (задачи) достижения цели Qj. В свою очередь, цель Qt характеризует средства достижения цели Qj +1 или задачи системы (j + 1)-го уровня. При этом цель высшего уровня представляет собой не простое сложение подцелей, а некоторую сложную процедуру объединения иерархической структуры, реализация которой приводит к достижению качественно новой цели высшего уровня. Графическое представление иерархической структуры целей имеет вид графа, называемого «деревом». Граф состоит из корней, так называемых «ветвей нулевого уровня», и «ветвей различного уровня», причем ветвн, непосредственно предшествующие корню (цели АКУКП), считают ветвями 1-го ранга, а по мере удаления — 2-го и последующих рангов. Каждая часть графа, кроме ветвей нулевого уровня, имеет одну и только одну непосредственно предшествующую часть. В начале разработки АКУКП как многоуровневой иерархической структуры цели могут быть сформулированы в достаточно общем виде, на понятийном эвристическом уровне. Однако для последующего этапа, связанного с выбором критерия (критериев) эффективности и проведением моделирования, они должны быть формализованы в конкретные качественные показатели желаемого результата. Второе из числа обсуждаемых важнейших понятий относят к иерархическому описанию рассматриваемого типа систем. Уже из самого определения сложной системы следует, что она не может быть описана с достаточной степенью полноты и детализации. В связи с этим приходится сталкиваться с дилеммой, заключающейся в нахождении компромисса между простотой описания, допускающей получение обозримых математических моделей состояния подсистем, и необходимостью учета многочисленных функциональных характеристик, возникающих в процессе работы системы. Достижения такого компромисса ищут на путях использования заданной иерархии описаний, при которой систему задают семейством моделей, каждая из которых описывает поведение системы с точки зрения раз личных уровней абстрагирования. Для каждого из этих уровней фиксируется набор характерных принципов, законов и особенностей, а также конкретных переменных, с помощью которых и описывается поведение системы. При этом эффективность иерархического описания тем больше, чем выше независимость моделей на различных уровнях. Подобный тип иерархий описания получил название стратифицированного описания. Уровни абстрагирования, включающие стратифицированное описание, обычно называют стратами. Принято, что функционирование АКУКП может быть описано не менее, чем на уровне 5 страт. На первой страте систему описывают на языке законов классической небесной механики, закономерностей и методов, составляющих предмет изучения космической баллистики и других дисциплин, позволяющих грамотно построить математические модели, используемые на дополетном и оперативном уровнях планирования полета. На страте физических операций описание состояния объекта управления осуществляют в рамках математического моделирования процесса функционирования конкретной управляемой технической системы, реализующей некоторую программу (план), не противоречащую основным закономерностям, учтенным на уровне страты более низкого уровня, для которого подсистема, являющаяся предметом описания второй страты, становится объектом или системой. Третья страта является информационной. На этом уровне оперируют как физическими, так и абстрактными нефизическими понятиями, такими как информационные потоки, массивы информации, выборки и т. д. На данной страте используют достаточно хорошо формализованные вычислительные процедуры. Стоящие же за ними физические законы в явном виде не рассматривают. Следующий стратифицированный уровень, базируясь на информации, полученной на уровне предшествующей страты, представляет собой существенно менее формализованный процесс принятия решения с учетом согласованных и вводимых а практику качественных показателей функционирования системы, сложившихся на данный момент внешних условий и ее собственного состояния. Хотя теория и алгоритмы принятия решений к настоящему времени разработаны (по крайней мере, применительно к относительно простым критериям) достаточно полно, участие в этой процедуре человека-оператора, зачастую ориентирующегося на интуицию и другие неформализованные понятия, делает ее хотя и менее детальной по уровню раскрытия, но более ясной с точки зрения конечной цели процесса управления полетом. Наконец, страта последнего уровня интегрирование «впитывает» в себя всю информацию, полученную на уровне предшествующих страт, и генерирует конечную целевую функцию управления космическим полетом — формирование командно-программного управления. Следует отметить, что относительная независимость страт открывает возможность для более гибкого и детального исследования поведения изучаемой системы, однако предположение об их полной независимости неправомерно, поскольку при этом возможен эффект искажения поведения системы в целом. В связи с этим выбор страт, в терминах которых описывают функционирование рассматриваемой системы, относят к числу творческих процессов, определяемых знаниями и квалификацией исследователя. Следующее понятие иерархии касается процессов принятия сложных решений. Прежде чем перейти к обсуждению концепции классификации иерархической схемы принятия решений, обратим внимание на две важнейшие особенности данной процедуры: ► принятие решения не терпит отлагательства, так как отсрочка может означать лишь то, что не выработано такого нового плана, который в сложившихся условиях был бы предпочтительнее возможных других альтернатив; ► невозможность строгого прогнозирования последствий реализации принятого решения в условиях априори неустранимой неопределенности информации о сопутствующих факторах и возникающих нарушениях сложившихся связей, исключает возможность полного формализованного описания ситуации, необходимой для рационального выбора альтернативной стратегии. Отмеченные особенности приводят к основной дилемме принятия решения: с одной стороны, при нарушении ранее принятого плана необходима его наискорейшая коррекция, с другой — возникают вполне обоснованные опасения, как бы «не навредить® в результате задействования скороспелого решения. Разрешение этой дилеммы может быть отчасти осуществлено при использовании иерархического подхода. Сущность этого подхода сводится к определению семейства проблем, которые должны быть разрешены последовательным путем, так чтобы решение любой проблемы из этой последовательности допускало определение и фиксацию каких-то параметров в следующей проблеме, последовательно сводя к нулю априорную неопределенность по мере подхода к последней из подпроблем. В этом случае решения первоначальной проблемы высшего иерархического уровня достигают при минимальных возможных потерях, как только будут решены все проблемы более низкого иерархического уровня. В терминах теории множеств эта процедура может быть формализована в следующем виде. При появлении информации (сведений) о возникновении ситуации, требующей принятия решения об изменении плана или стратегии поведения (функционирования) системы, ее элемент, наделенный функциями принятия решения, должен применить тот или иной алгоритм, определенный на более высоком иерархическом уровне, для нахождения наиболее рационального способа действий. Этот алгоритм может быть определен непосредственно в форме функционального отображения Ар, обеспечивающего получение решения для любого набора исходных данных, либо косвенно, на основе реализации процесса поиска. 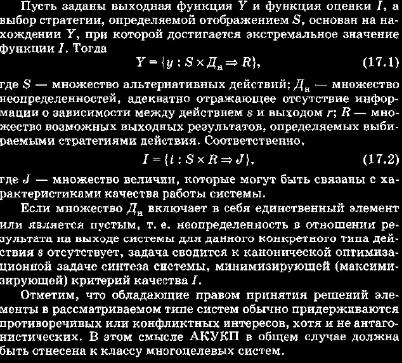 |
Случайные фотографии:






Статьи:
Видео:
Последние новости:
| Звездное скопление R136 |
| Ордовикский период |
| GRO J1655-40: вращающаяся черная дыра? |
| Административное состояние Земли |
| Химические элементы в остатках звезды |
Видео:
 | Как устроена черная дыра изнутри? |
| Путешествие на край Вселенной. часть 8/10 |
| Что будет с Землей, когда умрет Солнце? |
Последние новости:
| Зонд НАСА рассмотрел ледяные горы на поверхности Плутона |
| На Землю надвигается сильный метеоритный дождь |
| NASA создаст роботов для ремонта и дозаправки спутников |
| Россия и Япония совместно построят космический телескоп |
|
WalkInSpace.Ru Правила: «Путешествие в космос» © 2026 Использование материалов допускается при условии указания авторства WalkInSpace.ru и активной ссылки на www.WalkInSpace.ru. |
|