Баллистика и навигация космических аппаратов
|
18.1. Специальное программно-математическое обеспечение решения задач БНО Специальное программно-математическое обеспечение (СПМО) — это последовательность программных реализаций различных задач теории полета, адаптированных к конкретным условиям полета КА и создаваемых для обеспечения всей совокупности работ на различных этапах подготовки, реализации и послеполетного анализа по итогам выполнения конкретной программы полета. По составу выполняемых работ, способам построения программных комплексов и режимам их эксплуатации можно выделить СПМО, предназначенное для решения проектно-исследо-вательских задач, и СПМО задач БНО управления полетом. Проектно-исследовательское СПМО связано с выбором, оптимизацией, обоснованием баллистических схем полета КА, траекторий их движения, стратегий навигации и управления; оценкой ожидаемой точности наведения КА, вероятности выполнения динамических операций на орбите; анализом выполнения программ полета, функционирования систем КА и т. п. СПМО задач БНО, являясь элементом системы управления полетом КА, приобретает смысл технологического и вычислительного процесса, предназначенного обеспечить строго регламентированное по времени и форме входных и выходных данных выполнение операций приема и обработки измерительной информации, решения определенной последовательности математических задач, выдачи результатов расчетов и допускающего гибкое и оперативное изменение регламента указанных работ при возникновении нештатных или аварийных ситуаций.Разработку специального математического обеспечения начинают с определения математических моделей, отражающих реально происходящие физические процессы. Достоверность используемых явлений и точность получаемых количественных оценок полностью определяют качеством и полнотой задействованных математических моделей, под которыми понимают совокупность математических зависимостей, объединенных логическими условиями в общий алгоритм, позволяющих по заданным исходным данным воспроизвести моделируемый процесс — физическое явление — и получить требуемые результаты. При решспии практически любой задачи движения КЛ D ОБЩУЮ МАТЕМАТИЧЕСКУЮ МОДЕЛЬ входят: математические модели физических процессов и объектов, присутствующих в данной конкретной задаче; модель движения КА. Математические модели физических процессов и объектов — это прежде всего алгоритмические и иные описания различных систем КА, от которых зависят или на основе которых формируют модели двигательных установок, системы мягкой посадки и т. д. К ним же относят гравиметрические модели Земли или планет, модели физических объектов, участвующих в управлении, например, наземные станции слежения и т. д. Модель движения КА — это модель, которая включает математические модели действующих на КА сил и методы решения системы дифференциальных уравнений движения КА. Правильный выбор модели движения КА во многом определяет качество решения навигационных задач, получаемые количественные результаты и их точностные характеристики. Усложнение модели не всегда приводит к наилучшим решениям, однако всегда увеличивает объем работы, в том числе и время работы ЭВМ. При составлении той или иной рабочей модели всегда следует исходить из принципа разумное компромисса, не загромождая ее лишними составляющими и логическими связями, если этого не требуют достигаемые точностные характеристики исследуемых процессов, т. е. допустимыми являются такие ошибки модели движения КА, которые приводят к ошибкам расчетов заданных параметров с точностью в пределах допустимых значений. Уравнение движения центра масс ракетно-космической системы в общем случае записывают следующим образом: mV' = G + R+ P + Q, (18.1) где G, R, Р, Q — соответственно векторы сил тяжести, аэродинамических сил, тяги двигателей и других возможных возмущений (например, нерасчетное истечение газов. унос массы с поверхности КА и т. п.). В космической баллистике используют различные системы координат. При удачном их выборе дифференциальные уравнения движения КА даже при самом полном учете действующих на КА сил принимают более простой вид, что существенно упрощает решение конкретной навигационной задачи. Однако и при правильном выборе системы координат и состава используемых переменных, характеризующих движение, сложность решения системы дифференциальных уравнений и подбора рационального метода получения требуемых данных в значительной степени зависят от полноты и сложности задания правых частей уравнения (18.1), т. е. ее составляющих G, R, Р, Q. Эта задача достаточно сложна и многогранна, чтобы привести все ее возможные решения. Ограничимся несколькими характерными примерами и укажем одно выявленное из практики правило, заключающееся в следующем: различные навигационные задачи должны использовать различные модели движения. Действительно, предположим, что во всех случаях используют одинаковую модель движения. Ошибочность такого подхода очевидна. Во-первых, сложность модели движения определяется целевым назначением данного КА. Ее использование для решения большого числа сопутствующих задач, где не требуется высокая точность, приводит к снижению оперативности СПМО и резкому увеличению машинного времени, требуемого для решения всех задач БНО управления полетом. Во-вторых, даже частичное использование разработанного СПМО невозможно для нового КА, где требуется более высокая точность решения навигационных задач. В этом случае необходимо создание нового СПМО, что потребует огромных трудозатрат. Это условие исключает возможность разработки общего СПМО, пригодного для практического использования при управлении КА различных классов, ибо в этом случае даже самые простые КА, где требования по точности решения навигационных задач низки, будут использовать самые совершенные и соответственно самые сложные и громоздкие модели движения с большими затратами времени работы на ЭВМ. В силу отмеченного единственно правильным является другой подход, предполагающий, что наиболее точная модель движения используется только в задачах первого направления [9]: определение орбиты по результатам измерений, точное прогнозирование движения, определяющее целевое использование КА (эталонный прогноз для данного КА или класса КА); задачи расчета данных для маневра КА и для спуска на поверхность Земли или планеты назначения. Число подобных задач, как правило, невелико, и создание нового СПМО для новых КА существенно облегчается, так как переработки программ для большого числа задач, например, ряд задач СБИ, не требуется. Одним словом, с каждым новым КА происходит наращивание СПМО, его совершенствование, а не простая переработка. Перейдем к примерам. При решении задачи определения движения КА, находящегося на низкой орбите ИСЗ, помимо основной, центральной составляющей сил тяготения, используют разное количество членов, учитывающих нецентральность сил тяготения. В некоторых случаях, где требуется исключительно высокая точность, это могут быть десятки членов разложения земного потенциала. Кроме того, учитывают сопротивление атмосферы путем создания специальных моделей, но вместе с тем не учитывают силы притяжения от Солнца и планет. При полетах к планетам столь тщательный учет составляющих сил тяготения Земли не ведется, но зато обязательным является учет сил тяготения Солнца и других планет и их спутников, влияние солнечного ветра и т. д. Приведем уравнения движения, используемые в оперативных работах при спуске КА с орбиты ИСЗ, записанные в гринвичской относительной системе координат. Эта система отличается от абсолютной только тем, что плоскость X0OZ0 связана с плоскостью гринвичского меридиана. 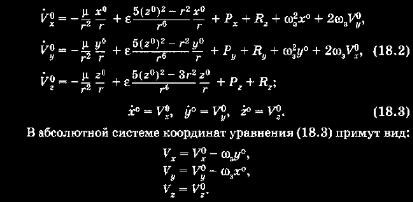 Первые члены в уравнениях (18.2) учитывают основную составляющую ускорения, вызванную притяжспием Земли; вторые члены — составляющие ускорения, вызванные влиянием сжатия Земли; третьи члены — составляющие ускорения за счет действия активных сил (тяги ДУ), а четвертые — составляющие аэродинамических сил. Последние члены в первых двух уравнениях системы (18.2) — составляющие ускорения за счет центробежных сил и сил Кориолиса. Следует отметить, что «активные» силы возникают только во время работы ТДУ, а аэродинамические силы учитывают при движении в плотных слоях атмосферы (при h < Ла). Конкретный вид членов Rx, Ry, R2 определяется типом спускаемого аппарата и принятым законом управления. В некоторых случаях к основной системе (18.2) и (18.3) следует добавлять уравнения, учитывающие движение КА около центра масс. |
Случайные фотографии:






Статьи:
Видео:
Последние новости:
| Рентгеновская Земля |
| Сны "Мира" |
| Рентгеновские звезды в скоплении 47 Тукана |
| Гигантское пятно на звезде HD 12545 |
| Каменноугольный период |
Видео:
 | Черные дыры - просто о сложном |
| Путешествие на край Вселенной. часть 2/10 |
| НЛО вторжение на землю (2/6) |
Последние новости:
| Зонд НАСА рассмотрел ледяные горы на поверхности Плутона |
| На Землю надвигается сильный метеоритный дождь |
| NASA создаст роботов для ремонта и дозаправки спутников |
| Россия и Япония совместно построят космический телескоп |
|
WalkInSpace.Ru Правила: «Путешествие в космос» © 2026 Использование материалов допускается при условии указания авторства WalkInSpace.ru и активной ссылки на www.WalkInSpace.ru. |
|