Баллистика и навигация космических аппаратов
|
18.4. Особенности БНО полета автоматических межпланетных станций Обсуждение особенностей БНО полета АМС проведем на примере какой-либо реально осуществленной экспедиции. За последние 40 лет в нашей стране было осуществлено достаточно много космических миссий, но бесспорно наиболее интересными, сложными и даже уникальными до настоящего времени являются полеты в конце 80-х гг. прошлого столетия АМС «Вега» и «Фобос». Обсуждению полета АМС «Вега» уже было уделено достаточное внимание в предшествующих главах. Рассмотрим другую уникальную межпланетную экспедицию. Особенности и исключительная сложность баллистико-навигационного обеспечения полета АМС «Фобос» были предопределены рядом объективных факторов, основные из которых следующие: ► впервые в практике космических полетов была поставлена сверхсложная задача комплексного исследования Марса и его спутников, включающая сближение с небесным телом небольших раз мерой со слабым гравитационным полем (максимальный размер Фобоса в поперечнике не превышает 27 км) и высадку на поверхность данного тела долгоживу-щей автономной станции (ДАС); ► для решения указанной задачи потребовалось создание принципиально нового космического аппарата: «Фобос» являлся КА нового поколения, оснащенным системами, обеспечивающими возможность более гибкого управления полетом АМС с реализацией различных режимов работы ее бортовых приборов — вплоть до закладки новых программных блоков в память БЦВМ непосредственно в процессе полета. Это привело к значительному усложнению анализа работы бортовых средств, увеличению объемов расчетов, в том числе и навигационных параметров, примерно в 10 раз по сравнению с объемом работ с предыдущими автоматическими станциями «Вега». Ряд установленных на АМС «Фобос» служебных систем, обеспечивающих управление ее полетом (бортовой управляющий комплекс, радиотехнические системы и др.), впервые проходили испытания в ходе полета, для чего требовалось проведение дополнительных баллистических расчетов с целью отработки этих систем и поиска выхода из всякого рода нерасчетных ситуаций; ► перед разработчиками АМС была поставлена задача доставки в окрестность Марса максимального количества научной аппаратуры. С целью экономии веса принимались нестандартные решения при реализации отработанных операций. Но самое главное, была найдена и реализована схема полета станции, не имеющая мировых аналогов. Сложность реализации такой схемы была отягощена отсутствием необходимых исходных данных, в частности, положение Фобоса к началу проектирования было известно с точностью в несколько сотен км, а обеспечить посадку на поверхность спутника Марса можно при знании положения, по крайней мере, на два порядка точнее. При этом практически не известны были районы высадки ДАС и многое др. Таким образом, можно констатировать, что по своей сложности и объему работ управление АМС «Фобос» приближалось к управлению полетом пилотируемых комплексов, что обусловливало высокие требования к организации взаимодействия баллистиков не только внутри страны, но и с зарубежными специалистами. Для управления станцией нового поколения стало необходимым не только привлечение специалистов высокого класса, но и разработка совершенного, точного и тонкого инструмента. Баллистики создали сложные модели движения АМС и работы ее систем и, соответственно, совершенные программно-математические расчетные и моделирующие комплексы, реализованные на современных ЭВМ. Кратко рассмотрим экспедицию автоматической межпланетной станции «Фобос». Как известно, периодически повторяется такое взаимное расположение планет старта и назначения, когда возможна организация полета АМС по так называемым энергетически оптимальным траекториям. Применительно к Марсу благоприятные ситуации появляются раз в 26 месяцев. В указанное время Марс приближается к Земле на расстояние 90 млн км. Через каждые 15...17 лет наблюдаются «великие противостояния» упомянутых планет, когда расстояние между ними составляет всего => 56 млн км. В 1988 г. имела место именно такая ситуация. Но это только необходимые астрономические условия; далее следует искать такую схему полета, для реализации которой требовались бы действительно минимальные энергетические затраты. «Фобос-2» стартовал 12 июля 1988 г., а 21 июля была проведена первая коррекция скорости станции всего на = 9 м/с (полная скорость АМС относительно Земли в данный момент превышала 11 км/с). Более 200 сут длился полет автоматической межпланетной станции к Марсу. Специалисты по управлению полетом АМС вместе с баллистиками отслеживали каждый шаг станции, контролировали работу ее систем, оценивали условия и режимы подхода к Марсу. 23 января 1989 г. была проведена еще одна коррекция скорости станции на «= 20,8 м/с, а 29 января АМС был сообщен тормозной импульс = 815 м/с, и она вышла на орбиту искусственного спутника Марса (ИСМ) — первую переходную орбиту (рис. 18.3), по которой совершила 4,5 оборота. 12 февраля 1989 г. был проведен маневр подъема перицентра орбиты станции, т. е. осуществлен ее перевод на вторую переходную орбиту. Период времени с 29.01.1989 г. до 12.02.1989 г. был отведен для изучения Марса при полете АМС на достаточно малых высотах в районе ее перицентра, а 12 февраля 1989 г. начались операции по перестроению орбиты станции для подхода к спутнику Марса Фобосу. 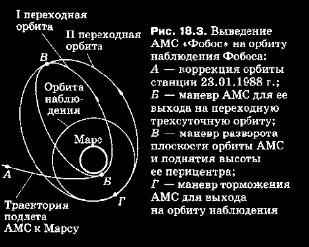 Уместно отметить, что решение задач сближения станции с Фобосом и высадки на его поверхность ДАС исключительно сложно. Использование для этого традиционных приемов и способов невозможно. Действительно, АМС нельзя было сразу направить к Фобосу хотя бы в силу того, что не были известны точно ни орбита марсианского спутника, ни его положение в пространстве. Еще за 2...3 месяца до запуска АМС точность знания эфемерид Фобоса составляла 100...150 км; к середине февраля 1989 г. положение Фобоса было уточнено и задавалось с погрешностью в 20...30 км, а для посадки на его поверхность, как указывалось выше, требуется точность знания в единицы км. Обычно в таких случаях выручал второй способ: выведение аппарата на орбиту искусственного спутника исследуемого объекта. Но Фобос не может иметь собственный спутник: масса Фабоса в 108 раз меньше массы Марса, силы тяготения столь же малы. Для того чтобы ДАС удержалась на поверхности спутника Марса, она должна каким-то образом зацепиться за грунт. Исходя из сказанного, для решения поставленной задачи необходимо было идти по длинному обходному пути: за счет серий маневров и коррекций подвести станцию к Фобосу, постепенно выравнивая плоскость ее движения, периоды обращения вокруг Марса и проч. Посадка на Фобос должна была произойти в первой декаде апреля. И оставшееся время от выхода АМС на первую переходную орбиту до сближения с Фобосом баллистики должны были не только постоянно определять параметры орбиты станции, но и уточнять орбиту Фобоса, его фигуру и массу, а также устанавливать место посадки. За счет маневра АМС 12 февраля 1989 г. ее перицентр был поднят до орбиты Фобоса, точнее, выше его на 300 км; 18 февраля последовал еще один маневр станции, в результате чего она была выведена на так называемую орбиту наблюдения, средний радиус которой на упомянутые 300 км был больше радиуса орбиты Фобоса (см. рис. 18.3). Раз в 7 сут АМС и Фобос находились на минимальном расстоянии друг от друга (300 км). Тем самым были созданы благоприятные условия слежения за Фобосом, в том числе проведения его телевизионных съемок, необходимых, в первую очередь, для навигации станции. Зятем последовали еще два маневра АМС, коррекции ее орбиты, и станция была выведена на первую квазиспутниковую орбиту (КСО), пребывание на которой обеспечивало наиболее благоприятные условия для телевизионной съемки Фобоса, так как станция не удалялась от Фобоса более чем на 200...600 км, а его освещенвость была приемлемой (см. рис. 18.4), после чего должны были последовать еще два маневра перевода АМС на КСО-2 и сближения станции с Фобосом (до нескольких десятков метров) с последующим десантированием ДАС, что намечалось по 7 апреля. Однако, к сожалению, этого по проиоошло. Всего 10 сут не хватило для того, чтобы решить указанную задачу. Вместе с тем была проведена огромная работа с АМС «Фобос» на ИСМ, рассчитано и выполнено большое число маневров станции и коррекции ее скорости в соответствии с предварительно разработанной (еще до старта АМС) программой. Естественно, в ходе реального полета решались задачи навигации станции и ее наведения на Фобос, определялась и, по мере необходимости, корректировалась стратегия сближения с ним, исходя из конкретно складывающейся обстановки и реальных возможностей бортовых систем станции.  Впервые в практике экспедиций АМС был применен и успешно отработан новый способ навигации по телевизионным изображениям естественного небесного тела сложной формы, каким является спутник Марса Фобос. Необходимость использования такого способа была вызвана требованиями к знанию взаимного расположения АМС и Фобоса с высокой точностью (в пределах 1...2 км) для организации посадки. Результаты телевизионной съемки, проводимой с борта станции, передавали на Землю, удаленную от нее на расстояние, превышающее 200 млн км, когда сигнал только в одну сторону идет более 10 мин. Обработку всей информации проводили «на земле», для чего было необходимо создать соответствующий комплекс программ и моделей. Прежде всего с применением всех имеющихся данных необходимо было разработать теоретическую модель фигуры Фобоса и программ но-математический аппарат, позволяющий воспроизводить ее в различных условиях наблюдений спутника при разном освещении его Солнцем с учетом имеющихся на Фобосе кратеров, которые можно было бы использовать как некоторые реперные точки. Затем следовало создать сложнейший программно-математический аппарат сравнения теоретических и реально полученных на борту АМС телевизионных изображений Фобоса и нахождения его геометрического центра для перехода к угловым величинам. В результате решения упомянутых и некоторых других задач определялись с достаточно высокой точностью инерциальные, «бортовые», углы, зависящие прежде всего от параметров орбит станции и Фобоса и, как следствие, позволяющие уточнять не только относительное положение АМС и Фобоса, но и их орбиты. Такой трудный, но единственно возможный путь был выбран для навигации станции «Фобос». В ходе полета АМС «Фобос» провели три успешных сеанса телевизионных наблюдений 21, 25 и 28 марта 1989 г. спутника Марса при использовании трех телевизионных бортовых камер с расстояния 191...1200 км. Некоторое представление об условиях и характере бортовой телевизионной съемки 25 марта 1989 г. можно получить, рассмотрев рис. 18.4. После тщательной обработки осей ипформацни было пайдспо 30 значений иперцналь-ных углов. Кроме этого, 27 февраля 1989 г. был проведен так называемый котировочный сеанс бортовых телевизионных наблюдений Юпитера, за счет чего была существенно повышена точность знания выставки телевизионных камер и, соответственно, измерений инерциальных углов. Исследование результатов углового положения Фобоса относительно АМС, полученных путем прямых телевизионных наблюдений за Фобосом в сочетании с высокоточными измерениями параметров траектории станции «Фобос» с Земли, а также результатов наземных астрономических наблюдений Марса и его спутников позволили решить задачу построения высокоточной теории движения Фобоса, а также переопределить его гравитационный параметр с высокой точностью = (7,22 ± 0,05)10"4 км3/с2, что особенно важно для будущих полетов к этому спутнику Марса. Полученные фундаментальные данные особенно важны при выборе стратегии сближения с Фобосом АМС в ходе подготовки последующих экспедиций к этому спутнику. Впервые в условиях космических полетов практически реализована классическая «задача трех тел», решение которой заключалось в выведении АМС «Фобос» на устойчивую квазиспутниковую орбиту малого небесного тела, которым является Фобос. На рис. 18.5 показана схема формирования такой орбиты. Для этого потребовалось проведение двух маневров Ml и М2 станции и одной коррекции ее скорости в течение двух недель. Следует подчеркнуть, что в результате расчетов маневров АМС и последующей их реализации происходит не механический переход станции с одной орбиты на другую, а планомерное выполнение операции при целом ряде условий и ограничений, в частности, видимости АМС с наземных станций слежения, ее заходов за Марс, Солнце и т. п. Например, последний маневр перехода на КСО 21 марта 1989 г. проводился в момент, когда Марс, Фобос, АМС и Солнце лежали на одной линии, а расстояние между станцией и Фобосом не превышало 200 км. Соблюдение упомянутых условий было достигнуто за счет коррекции ее орбиты 15 марта 1989 г. Малейшие погрешности этой коррекции привели бы к нарушению условий перехода 21 марта. Одним словом, потребовались предельная точность баллистических расчетов и не менее точное исполнение маневров АМС и коррекции ее орбиты с помощью бортовой аппаратуры. Из рассмотрения рис. 18.4 видно, что автоматическая станция и Фобос, являясь спутниками Марса, имеют практически одинаковые периоды вращения и плоскости движения орбиты, сдвинутые относительно Марса по максимальному и минимальному от него расстоянию всего на 200 км за счет различия эксцентриситетов. В результате достигается поразительный эффект. Как ни мала сила притяжения Фобоса, однако она не «отпускает» АМС более чем на 400...500 км даже при различии периодов обращения Фобоса и АМС до ±(20...40) с. В зависимости от относительного положения станции и Фобоса последний то «тормозит», то «разгоняет» АМС, не позволяя ей удаляться на большие расстояния. В результате у Фобоса появляется квазиспутник — это, по существу, спутник Марса, но в любой момент времени находящийся вблизи Фобоса.  |
Случайные фотографии:






Статьи:
Видео:
Последние новости:
| Карта Эроса |
| Небесный идальго не допустит катастрофы |
| Самая дальняя измеренная вспышка |
| Ганглий спиральной галактики NGC 3184 |
| Лучи кратера Дегас на Меркурии |
Видео:
 | Cosmic Soccer Balls |
| Черные дыры - просто о сложном |
| SOFIA Flight Tests for Early Science Progress |
Последние новости:
| Зонд НАСА рассмотрел ледяные горы на поверхности Плутона |
| На Землю надвигается сильный метеоритный дождь |
| NASA создаст роботов для ремонта и дозаправки спутников |
| Россия и Япония совместно построят космический телескоп |
|
WalkInSpace.Ru Правила: «Путешествие в космос» © 2024 Использование материалов допускается при условии указания авторства WalkInSpace.ru и активной ссылки на www.WalkInSpace.ru. |
|