Аппараты М2 И HL-10 (Часть 2)
Первый планирующий полет аппарата M2-F2 состоялся 12 июля 1966 г. Модель массой 2,67 т была отделена от самолета В-52 на высоте 13,5 км при скорости 697 км/ч (М = 0,6). Снизившись до высоты 11,8 км, пилот М. Томпсон совершил левый разворот на 90° с углом крена 45°. Аналогичный вираж был выполнен перед заходом на посадку. Выравнивание модели началось при горизонтальной скорости 504 км/ч. Постепенно скорость снижения была уменьшена с 75 до 3 м/с, а горизонтальная скорость при касании поверхности земли составила 306 км/ч. Автономный полет изделия продолжался 3 мин 37 с.
При 16-м полете (10 мая 1967 г.) произошла аварийная посадка, едва не стоившая жизни пилоту. Причиной потери управления изделием стал «голландский шаг», при котором угол крена достигал 140°.
Полуразрушенный аппарат M2-F2 было решено восстановить и существенно доработать конструкцию. Для обеспечения поперечной устойчивости на модели, получившей обозначение M2-F3, был установлен центральный киль, а также блоки реактивных двигателей системы управления.
Бросковые испытания аппарата M2-F3 возобновились в июне 1970 г., первый полет изделия с включением маршевого ЖРД состоялся спустя полгода. На заключительном этапе летных испытаний, завершившихся в 1972 г., ракетоплан M2-F3 использовался для решения ряда вспомогательных задач, например, для отработки системы дистанционного управления изделием (подобное оборудование предполагалось создать для МТКС «Спейс Шаттл»), а также для оценки летных характеристик модели при предельно допустимых высотно-ско-ростных режимах полета.
Начало бросковых испытаний аппарата HL-Юс самолета В-52 также было осложнено серьезными проблемами. После первого же автономного полета, состоявшегося в декабре 1966 г., модель потребовала серьезных доработок — управляемость изделия в поперечном направлении была признана крайне неудовлетворительной, при разворотах эффективность элевонов резко падала. Для устранения недостатков потребовалась существенная доработка внешних килей, формирующих поток над управляющими поверхностями.
Планирующие полеты модели HL-10 продолжились лишь весной 1968 г. При двенадцатом испытании, осуществленном в октябре указанного года, впервые был произведен запуск маршевого ЖРД.
 Предполетная подготовка аппарата HL-10 Предполетная подготовка аппарата HL-10
Так же как и модель M2-F3, аппарат HL-10 использовался в интересах программы «Спейс Шаттл». Последние два его полета, выполненные летом 1970 г., были посвящены отработке посадки с включенной силовой установкой (в ходе этого эксперимента предполагалось оценить эффективность применения вспомогательных двигателей на заключительном этапе спуска орбитальной ступени МТКС). В этих целях основной двигатель модели XLR-11 был заменен тремя ЖРД на перекиси водорода.
В целом эксперимент прошел успешно — работавшие при посадке двигатели позволили уменьшить угол глиссады с 18° до 6°. Однако, как отметил пилот аппарата, несмотря на активную работу наземных средств наведения, некоторые сложности возникли при определении момента включения ЖРД.
За весь период испытаний аппарата HL-Юбыло выполнено 37 стартов. При этом модель (в комплектации с основным двигателем) установила рекордные для всех ракетопланов с несущим корпусом показатели скорости (М=1,86) и высоты полета (27,5 км).
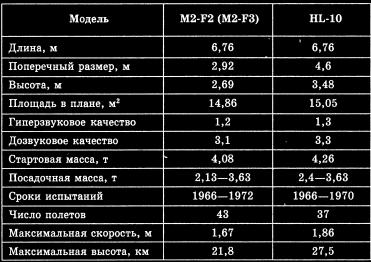
Таблица 2.1
Основные характеристики ракетопланов M2-F2 (M2-F3) и HL-10
|