Авиационно-космические системы США
|
Аппараты Х-24А И Х-24В Третий, завершающий этап программы START — проект PILOT («Piloted Low-Speed Tests» — «Пилотирование аппаратов на малых скоростях») предусматривал дальнейшее изучение аэродинамических характеристик аппаратов с несущим корпусом на небольших сверхзвуковых, транс- и дозвуковых скоростях, причем в пилотируемом режиме. В 1966 г. по заказу ВВС компания «Martin Marietta» приступила к созданию ракетоплана Х-24А, способного развивать скорость до М=2. По внешнему облику аппарат с фирменным обозначением SV-5P был схож с моделью Х-23А; наиболее существенными отличиями в аэродинамической схеме нового изделия являлось наличие центрального киля и восьми управляющих поверхностей.  Аппарат Х-24А Внешние кили оснащались разрезными рулями направления, верхние секции которых считались основными. В хвостовой части аппарата Х-24А располагалось по две пары щитков-элевонов, выполнявших функции руля высоты (при симметричном смещении) и элеронов (при дифференциальном отклонении). Возможности пилота по изменению угла тЯйга-жа определялись диапазоном от - 25 до + 35°. Кроме того, в ходе полета проводилась автоматическая балансировка управляющих поверхностей в зависимости от скорости полета и угла атаки. Таким образом, модель Х-24А стала одним первых летательных аппаратов, на которых была реализована система активного управления. Несмотря на подобные новшества, сложность управления аппаратом оказалась достаточно высокой. Общее число индикаторов, датчиков и переключателей, размещенных в кабине пилота, почти в полтора раза превысило приборную оснащенность моделей M2-F2 и HL-10. Обшивка корпуса аппарата Х-24А изготавливалась из алюминиевого сплава. В герметизированной кабине монтировалось катапультируемое кресло, обеспечивающее покидание самолета на нулевой высоте и при нулевой скорости. Основные характеристики изделия представлены в сводной таблице 2.2. Силовая установка ракетоплана Х-24А комплектовалась основным — четырехкамерным двигателем XLR-11-RM-13 тягой 3,62 т и двумя вспомогательными тягой по 181 кг, предназначенными для увеличения скорости при нештатной посадке. Цилиндрические баки жидкого кислорода и несколько разбавленного спирта для маршевого ЖРД размещались в центральной части фюзеляжа. Запуски аппаратов Х-24А осуществлялись с борта самолета В-52 на высоте 13,5 км и при скорости М=0,6—0,8. Полетам с включенным маршевым ЖРД, начавшимся в марте 1970 г., предшествовал длившийся почти год этап бросковых испытаний, в ходе которых отрабатывалась техника захода на посадку. В штатном режиме активный полет аппарата Х-24А выполнялся по следующей схеме: после отделения от самолета и достижения высоты около 20 км модель выполняла «горку». На высоте 6—8 км начинались маневры: виражи влево и вправо, изменение угла тангажа, выравнивание и посадка со скоростью 260—574 км/ч. В период с апреля 1969 г. по июнь 1971 г. было осуществлено 28 запусков модели Х-24А. Учитывая заинтересованность многих организаций в развитии аппаратов с несущим корпусом, компания «Martin Marietta» на собственные средства изготовила два аналога аппарата Х-24Ас турбореактивным двигателем J60 тягой 1,5 т. Эти модели с рабочим обозначением SV-5J были рассчитаны на самостоятельный взлет с аэродрома и набор высоты для последующего планирующего спуска. Однако данная инициатива, имевшая в первую очередь учебно-тренировочные цели, не была поддержана правительственными структурами, и проект был закрыт. Среди причин отказа от закупки модели SV-5J, вероятно, следует назвать незначительный объем данных, который можно было бы получить при ее испытаниях. В то время как отличительной особенностью всех исследовательских работ по аппаратам с несущим корпусом являлось разнообразие аэродинамических схем. Летом 1971 г. ВВС объявили о создании на базе модели Х-24А ракетоплана Х-24В. В целя^ экономии средств в составе нового изделия широко применялись отдельные элементы силовой конструкции и бортовые системы предшественника, включая маршевый ЖРД. Качественным же изменениям подверглась аэродинамическая схема модели. Треугольный в плане фюзеляж с плоским днищем приобрел двойную стреловидность — в носовой части 78°, в хвостовой 72°. Подобная форма обеспечила изделию гиперзвуковое качество около 2,5. При этом дальность бокового маневра при сходе с орбиты увеличилась бы до 2000—2400 км. Выбранная схема с обозначением FDL-8X была рассчитана специалистами Лаборатории аэродинамики полета FDL (Flight Dynamics Laboratory), входящей в структуры ВВС, для перспективных ударных и разведывательных аппаратов с крейсерской скоростью М=4—12. Заданные для модели Х-24В показатели максимальной скорости (М=1,5—1,7) и высоты полета (18—20 км) определялись лишь мощностью двигательной установки и прочностью алюминиевого корпуса. (Позднее ВВС предполагали изготовить две усиленные модификации этой модели — одну для отработки перспективных ВРД, а другую для изучения условий полета при возвращении с орбиты. Однако эти планы воплощения не получили.) Управляющие поверхности хвостовой части фюзеляжа и вертикальных килей модели были сохранены с базового изделия. Однако обе пары щитков стали теперь использоваться только в качестве руля высоты. Для поперечного управления было решено использовать два внешних элерона, установленных в расширенной части корпуса. Таблица 2.2 Основные характеристики ракетопланов Х-24А и Х-24В 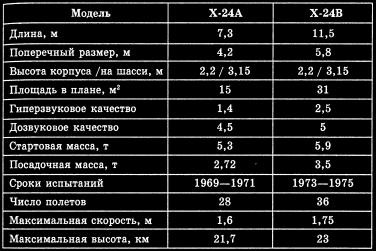 Программа летных испытаний аппарата Х-24В состояла из трех этапов каждый продолжительностью около года. В ходе первого из них, начавшегося летом 1973 г., была проведена серия бросковых испытаний и активных полетов с целью общей оценки модели. Потом началось усложненное пилотирование на различных скоростных режимах, траекториях, высотах, эксперименты по изучению взаимодействия элементов управления и т.п. Затем модель стала применяться для обеспечения других программ, в первую очередь «Спейс Шаттл». При реализации последней программы широко использовались данные, полученные при создании и испытаниях всех ракетопланов с несущим корпусом. Тем не менее летные характеристики аппарата Х-24В и мастерство его пилотов оказались решающими факторами при решении весьма значимого вопроса о применении в составе орбитального корабля МТКС вспомогательных двигателей для активного маневрирования на заключительном этапе спуска и при посадке. Летчики, испытывавшие ракетопланы, считали неоправданным наличие на орбитальной ступени дополнительной силовой установки с соответствующим запасом топлива. В любом случае выход в зону включения посадочных двигателей требует достаточно высокой точности при планировании. Анализ условий экспериментальной посадки модели HL-Юс работающими ЖРД показал, что в таком режиме процесс управления изделием только усложняется, и нагрузка на пилота существенно возрастает. Окончательное решение по проблеме было принято в августе 1975 г., когда два испытателя— один от NASA, а другой от ВВС — выполнили штатные полеты на аппарате Х-24В с демонстрационной посадкой на бетонную полосу базы Эдвардз. В обоих случаях при спуске с высоты около 18 км и с углом планирования 24° летчики обеспечили точность приземления около 1,5 м. 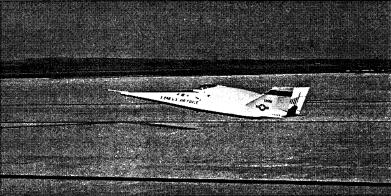 Посадка аппарата Х-24В По мнению испытателей, подобную посадку можно было бы произвести на любом из созданных аппаратов с несущим корпусом. Однако по своим летным и пилотажным характеристикам ракетоплан Х-24В был признан наилучшим. Далее по составленному летчиками рейтингу следовали модели HL-10, M2-F3 и Х-24А (вкл. 18). |
Случайные фотографии:






Статьи:
Видео:
Последние новости:
| Солнечная батарея |
| Межзвездная радиосвязь |
| Палеозойская эра |
| Небесный идальго не допустит катастрофы |
| Лишний литий в звездах |
Видео:
 | "Cosmic Vision" |
| Монстр млечного пути 4/4 |
| Секреты спутникового телевидения |
Последние новости:
| Зонд НАСА рассмотрел ледяные горы на поверхности Плутона |
| На Землю надвигается сильный метеоритный дождь |
| NASA создаст роботов для ремонта и дозаправки спутников |
| Россия и Япония совместно построят космический телескоп |
|
WalkInSpace.Ru Правила: «Путешествие в космос» © 2024 Использование материалов допускается при условии указания авторства WalkInSpace.ru и активной ссылки на www.WalkInSpace.ru. |
|