12.1. Особенности решения навигационной задачи при автономном выполнении межорбитальных маневров
Условия решения навигационной задачи на борту КА, т. е. при реализации автономного способа управления маневром, значительно отличаются от условий решения этой задачи с помощью наземных средств КИК. К основным особенностям автономного решения задачи навигации обычно относят следующие:
► состав навигационных измерений ограничен, а общее число измерений невелико;
► БЦВМ, в которой проводят все вычисления, обладает ограниченными возможностями с точки зрения полноты математического описания процесса в реализуемом алгоритме, объеме и точности проводимых вычислений;
► участие экипажа КА в решении навигационной задачи вносит дополнительные погрешности, обусловленные влиянием на него всех специфических (часто экстремальных) факторов космического полета.
При разработке алгоритмов автономного решения навигационной задачи, как правило, исходят [21, 85] из того, что в качестве первичной (текущей) измерительной информации могут быть использованы данные измерений, проводимых совместно или в отдельности и принадлежащих, например, к одному из следующих видов:
► определение утла между направлениями на два небесных тела;
► определение момента затмения звезд;
► измерение высоты орбиты или расстояния до центра планеты и т. д.
Состав навигационных измерений при этом может быть самым различным. В частности, при использовании в качестве измерительных средств секстанта и высотомера полный состав измерений для припланетной навигации может включать в себя:
► измерение углов возвышения двух звезд над горизонтом планеты и углового диаметра той же планеты;
► измерение углов возвышения трех звезд над горизонтом планеты;
► намерение возвышения двух звезд над горизонтом планеты и высоты орбиты КА и пр.
При этом все измерения должны иметь временную привязку, осуществляемую с помощью бортового эталона времени.
Методы решения навигационной задачи, основанные на проведении АСТРОНОМИЧЕСКИХ ЗАСЕЧЕК, представляют собой основной класс методов автономной навигации при межпланетном перелете. С точки зрения общей классификации методов навигации [12], все возможные виды навигационных засечек, к которым относят астрономические, должны быть отнесены к позиционному методу (методу поверхностей и линий положения).
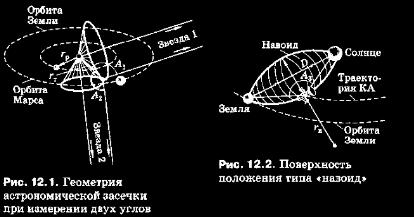
Действительно, предположим, что навигационную задачу решают с помощью измерения соответствующих углов. Измерение угла, в вершине которого находится КА. между линией визирования ближайшего небесного тела (планеты или Солнца) и линией визирования звезды дает одну поверхность положения (в виде конуса с вершиной, совмещенной с ближайшим небесным телом). Второе угловое измерение на основе визирования того же самого ближайшего тела и другой звезды образует вторую поверхность положения. В результате пересечения указанных поверхностей положения будут иметь место (рис. 12.1) две линии положения, одна из которых является линией положения КА. Исключение неопределенности в выборе фактической линии положения требует измерения угла визирования третьей звезды по отношению к тому же ближайшему небесному телу. На практике отмеченную неопределенность легко разрешают без проведения третьего измерения, поскольку линии положения разнесены обычно достаточно далеко, и приближенного знания местоположения КА оказывается достаточно для этого. Наличие линии положения еще не определяет местоположения КА. Для этого необходимо найти пересечение линии положения с третьей поверхностью положения либо полученной по результатам других измерений второй линией положения. В этом смысле третье измерение является необходимым. Если в качестве такового выбрать измерение угла между линиями визирования двух ближайших до КА небесных тел (планеты и Солнца), то в результате будет получена третья недостающая поверхность положения, называемая набоидом (рис. 12.2). Пересечение ее с полученной ранее линией положения дает местоположение КА относительно ближайшего небесного тела. Согласно рис. 12.2, навоид представляет собой поверхность, образованную вращением дуги окружности вокруг линии, соединяющей выбранные небесные тела. Радиус окружности определяют расстоянием D между телами и измеренным углом между их линиями визирования...
|