12.2. Моделирование базисных направлений и получение навигационной информации с помощью астрономических, гироскопических датчиков и комплексных навигационных систем пилотируемых и беспилотных КА
Для моделирования базисных направлений и решения задач космической навигации все более широкое применение получают АВТОНОМНЫЕ ОПТИКО-ВИЗУАЛЬНЫЕ АСТРОНОМИЧЕСКИЕ СРЕДСТВА. К их числу относят солнечные, планетные и звездные датчики, аст-ровизиры, космические секстанты и другие устройства. Моделирование базисных направлений предполагает обычно работу соответствующих датчиков в режиме нуль-индикаторов. Поскольку постоянная составляющая модулированного в приборе светового излучения от звезды пропорциональна угловому расстоянию от оптической оси датчика, сигнал рассогласования используют для задания соответствующего базисного направления путем поддержания линии визирования на заданное светило. Контроль за работой автоматического звездного датчика можно осуществлять с помощью ручного АСТРООРИЕНТАТОРА, принцип действия которого основан на совмещении искусственных ориентиров в виде светящихся колец (меток) со звездами, наблюдаемыми одновременно через оптику прибора. Положение искусственных ориентиров в поле зрения астроориентатора определяется расчетными углами положения осей КА в пространстве. Для имитации искусственных ориентиров используют звездный глобус.
Измерение перечисленных ранее навигационных угловых параметров на борту пилотируемого КА может быть выполнено с помощью оптических угломерных приборов — секстантов. В качестве ориентиров при этом обычно используют звезды, а линией отсчета (базисным направлением) служит горизонт планеты.
Однако приборы данного типа обладают и определенными недостатками, к числу которых относят прежде всего их невысокую помехозащищенность (возможность засветки объективов прямым или отраженным солнечным светом, факелом работающих ракетных двигателей и т. д.). Поэтому наряду с ними в космической технике для физического моделирования базисных направлений и прежде всего базовых трехгранников (декартовых систем координат) нашли широкое применение гироскопические системы. Последние, обладая простотой конструкции, высокой степенью надежности и практически абсолютной помехозащищенностью, имеют тот недостаток, что стабильность хранения ими базисных направлений гарантируется (без принятия специальных мер) с заданной точностью лишь в весьма ограниченном интервале времени. Следовательно, если возникает необходимость в течение длительного времени хранить заданное базисное направление с помощью свободного гироскопа либо физически смоделировать с помощью гироскопов базовый трехгранник, то необходимо периодически или непрерывно вводить коррекцию в его (их) работу. Коррекция возможна лишь путем получения необходимой информации с помощью других позиционных датчиков, например, оптического типа. Применительно к решению многих задач, в том числе и навигационных, те или иные гироскопические комплексы все же оказываются весьма полезными и просто необходимыми. Например, длительное моделирование базисного направления с помощью оптических средств не может быть реализовано в силу периодического захода КА в тень планеты. В этом случае периодический переход на режим гироскопической памяти вполне оправдан и рационален.
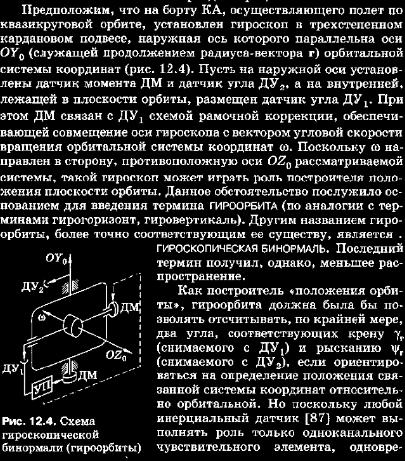
менный съем значений двух углов невозможен. В связи с этим гироорбита может быть использована:
► как построитель направления для отсчета угла рыскания; в этом случае она комплексируется построителем местной вертикали любого типа, в частности инфракрасной вертикалью (ИКВ), служащей базисным направлением для отсчета угла крена;
► для определения крена при работе в комбинации с датчиком, обеспечивающим построение базисных направлений для отсчета углов рыскания и тангажа.
При построении направления вертикали может быть использован дополнительный гироскопический элемент в виде свободного гироскопа, главная ось которого параллельна оси ОY0 орбитальной системы координат. В этом случае выходные сигналы построителя местной вертикали (в частности, ИКВ) используют не только для непосредственного определения соответствующих углов, отсчитываемых от этого базисного направления, но и для коррекции положения главной оси гироскопа (рис. 12.5), образующего вместе с построителем вертикали единое устройство (гироскопическую вертикаль). Это устройство обладает более высокой точностью прежде всего благодаря фильтрации значительной части собственных ошибок построителя вертикали, осуществляемой гироскопом. Гироскопическую вертикаль (ГВ) обычно конструктивно объединяют в одном общем кардановом подвесе с гироорбитой (ГО), размещая их роторы так, как показано на рис. 12.5. В результате получают гироскопическую систему, задающую направления осей OY0 и OZ0, т. е. по существу строящую на борту КА все три оси орбитального трехгранника OX0Y0z0. Поэтому такую систему называют пространственной или трехосной гироорбитой.
Очевидно, что в качестве базовой системы координат может быть использована не только орбитальная. В этом случае гироскопическая система должна осуществлять построение любой опорной системы, преобразование которой к требуемой (в частности, орбитальной) должно производиться с помощью специальных преобразователей координат. Примером такой трехосной гироскопической системы может служить так называемая двухроторная гироорбита.
Построители базисных направлений, решающие весьма важную часть навигационной задачи, все же не относят непосредственно к числу навигационных измерительных систем, предназначенных для определения местоположения КА. Они входят в состав таких систем, которые в силу использования датчиков, работающих на различных физических принципах, относят к числу комплексных [12].
Работу такого типа систем рассмотрим на примере радиоаст-роинерциальной навигационной системы (РАИНС) пилотируемого космического аппарата [47, 90]. РАИНС состоит из четырех основных подсистем: инерциальной с гироскопическим построителем базовой системы координат (гироблоков), подсистемы аст-рокоррекции, радиоизмерителей и вычислительного устройства, как правило, БЦВМ. Типовая функциональная схема РАИНС пилотируемого КА приведена на рис. 12.6. Оптическую систему астроинерциального блока устанавливают обычно на стабилизированной платформе, в результате чего достигают более высокой точности определения навигационных параметров. Подсистема астрокоррекции должна выдавать в БЦВМ сигнал наличия звезды в поле зрения оптического блока, величину углов между осью визирования светила и осями моделируемой на борту системы координат (сопровождающей системы). Выставку платформы осуществляют по двум заранее выбранным навигационным звездам. Ее можно проводить как в автоматическом режиме, так и космонавтом вручную. Выбор навигационной звезды осуществляют по каталогу, хранящемуся в памяти БЦВМ, включающему в общем случае несколько десятков астроориен-тиров. Информация о текущей высоте полета необходима для реализации алгоритма инерциальной навигации при выполнении маневров, а также для определения параметров орбиты. Наличие специального табло позволяет космонавту визуально отслеживать получаемую навигационную информацию, контролируя работу системы.
Для выполнения навигационных изменений, кроме звезд и горизонта Земли или Луны, можно использовать и наземные ориентиры с заранее известными координатами: крупные строительные сооружения, реки, озера, острова, характерные изгибы береговой линии и т. д. Выбор навигационных ориентиров на земной поверхности возлагают на космонавта.
|