12.3. Методические погрешности и инструментальные ошибки построителей базисных направлений и бортовых астроиэмерителей. Методы повышения точности измерений при решении навигационных задач
Одной из главных, а во многих случаях основной причиной возникновения ошибок любых гироскопических приборов служат действующие на гироскоп возмущающие моменты, обусловленные техническим несовершенством конструкции подвеса. Соответствующие им ошибки гироскопических приборов, используемых в качестве построителей базисных направлений, называют инструментальными погрешностями. Следует, правда, отметить, что по сравнению с гироскопическими приборами, работающими на Земле, гироскопические приборы, установленные на борту КА, оказываются в более благоприятных условиях эксплуатации (87].
Прежде всего при полете КА по орбите становятся практически несущественными несовпадение центра масс гироскопа с центром его подвеса и, как следствие, все те трудно преодолимые факторы, которые порождают это несовпадение. Действительно. возмущающий момент, приложенный к несбалансированному гироскопу, в условиях свободного полета может образовывать только силы инерции, возникающие при угловых движениях КА, а также приливные силы, если аппарат движется в сильном гравитационном поле (в случае низкоорбитального ИСЗ). Однако влияние этих факторов очень мало. Поэтому на участках свободного полета разбалансировка подвеса гироскопа, находящаяся в пределах, обеспечиваемых современной технологией производства гироскопических устройств, не вызывает сколь-нибудь заметного по величине возмущающего момента. Из-за практически полной разгрузки опор гироскопа, наступающей в условиях невесомости, резко снижаются и моменты сопротивления в подшипниках его подвеса.
Однако изложенное выше относится только к участкам не-возмущенного свободного полета КА. На участках управления движением, т. е. во время работы двигательной установки, гироскопические приборы будут испытывать действие перегрузок, соответственно условия их работы будут приближаться к условиям работы наземных гироприборов со всеми вытекающими отсюда последствиями.
Оптические приборы также обладают своими (хотя и меньшими, чем гироскопические) инструментальными погрешностями. Решение проблемы снижения уровня инструментальных погрешностей связано с проведением длительных и дорогостоящих опытно-конструкторских разработок и сопряжено, таким образом, с созданием приборов следующего поколения. Рассмотрение принципов построения их служит темой самостоятельного обсуждения, выходящего за рамки настоящего учебника.
Более обозримые результаты в области повышения точности формирования базисных направлений и навигационных измерений в целом могут быть получены за счет совершенствования алгоритмического обеспечения решаемой задачи.
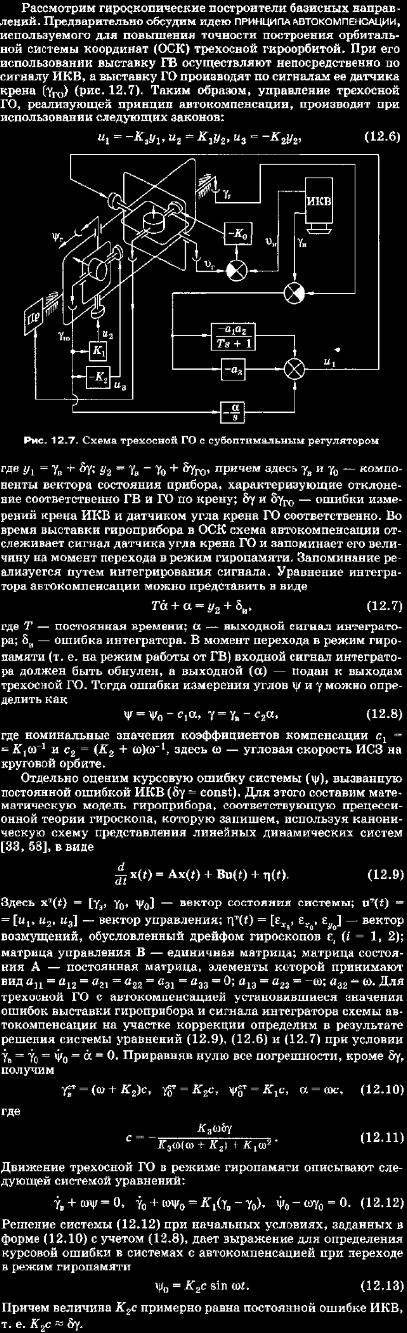
Таким обраэом, за счет незначительного усложнения прибора при реализации принципа автокомпенсации достигают некоторого повышения точности его работы. Однако возможности данного метода повышения точностных характеристик трехосной ГО ограничены. Дело заключаете^ в том, что при переходе в режим гиропамяти даже с нулевыми ошибками построения базисных направлений (при компенсации ошибок в выходных сигналах прибора) в дальнейшем происходит их достаточно быстрое возрастание, и система теряет требуемую точность построения ОСК. Объясняется это тем, что в силу вращения орбитальной системы фактически имеющие место ошибки выставки гироскопов переходят из канала курса в канал крена и обратно в процессе всего времени движения КА по орбите. Помимо ошибок режима гиропамяти, связанных в значительной степенис ошибками выставки, на величину суммарной ошибки оказывают также влияние постоянная ошибка ИКВ и дрейф гироскопов. В этом смысле более предпочтительные результаты обеспечивает подход, связанный не с изысканием новых возможностей компенсации ошибок выставки гироприбора в его выходных целях, а ориентированный на разработку алгоритмов, обеспечивающих непосредственное приведение осей гироприбора в ОСК с точностью до нейзмеряемых значений погрешностей выставки.
Соответствующая последнему из сформулированных подходов задача может быть решена на основе применения методов теории систем и, в частности, метода пространства состояний в его современной трактовке [33]. Указанный метод позволяет посредством исследования наблюдаемости как структурного свойства динамической системы [12,28] выявить фундаментальные свойства трехосной го, оценить теоретический предел достижимой точности ее работы, а затем на основе проведенного анализа обосновать структуру и определить алгоритм ее функционирования с заранее заданными динамическими и точностными характеристиками [58].
Расчет ошибок ГО с а3 = 0 (см. рис. 12.7) показывает [58], что описанный в указанной работе подход в состоянии обеспечить достижение точностных (инструментальных) характеристик, превосходящих соответствующие характеристики ГО с автокомпенсацией по курсу в 2...3 раза, по крену — примерно в 1,5 раза. Тем не менее даже в этом случае ошибки построения базовой системы координат остаются достаточными, чтобы учитывать их при оценке точности навигационного обеспечения межорбитальных маневров КА.
К числу методических погрешностей бортовых астроизмери-телей относят, прежде всего, неточности фиксации момента и неодновременность измерений; влияние скорости движения КА по орбите, приводящей к угловой ошибке, называемой аберрацией; ошибки визирования, обусловленные движением КА относительно его центра масс, а также погрешности, обусловленные преломлением лучей света атмосферой (явление рефракции).
Большинство указанных выше методических погрешностей астроизмерений носит систематический характер, что позволяет учесть их при последующей обработке результатов измерений в БЦВМ.
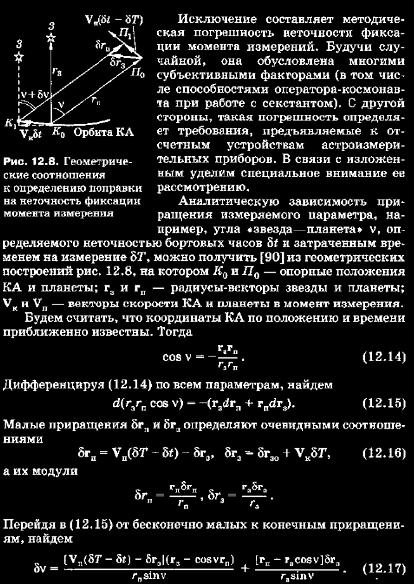
Из (12.17) видно, что величина погрешности измерения на-вигационного параметра будет минимальной при значении угла v, близком к 90°. Следовательно, при проведении астроизмере-ний целесообразно выбирать одно из светил, находящееся строго в зените по отношению к КА на момент проведения обсервации. Необходимая точность фиксации моментов измерений может быть получена из соотношения, определяющего изменение истинной высоты светила (т. е. углового расстояния по кругу высоты от истинного горизонта до светила) в орбитальном полете:
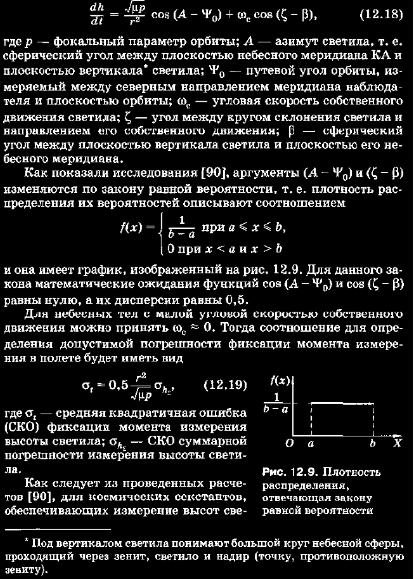
тил с погрешностью менее одной угловой минуты, точность фиксации моментов измерений должна быть не хуже 0,1 с. Такая точность выполнения засечек времени находится на пороге возможностей оператора. Это обстоятельство вынуждает ставить вопрос об автоматизации астронавигационных измерений, возлагая на измерения, проводимые космонавтом вручную, лишь функции приближенного определения местоположения с целью контроля работы автоматических или автоматизированных систем. Эффективным средством повышения точности определения местоположения либо полного фазового вектора состояния КА в космическом полете является применение методов оптимальной обработки статистической информации. В частности, рекуррентная фильтрация нашла уже достаточно широкое применение при решении многих задач космической навигации.
Применение схемы оптимальной фильтрации обсудим применительно к обработке навигационных измерений для описанной ранее типовой комплексной (радиоастроинерциальной) навигационной космической системы (см. рис. 12.6).
Будем считать, что радионавигационная часть РАИНС осуществляет построение местной вертикали и измеряет расстояние до поверхности Земли, При принятии предположения о сферичности Земли это будет означать, что известно расстояние от КА до центра Земли. Функции астроориентатора ограничим решением задач начальной выставки и коррекции инерциальной системы. Предположим, что ИНС моделирует нормальную земную систему координат, ориентация осей которой (для круговой орбиты КА) совпадает с ОСК. Предположим, что рассматриваемая ИНС не имеет динамических ошибок. На основании сведений, изложенных в гл. 5 (разд. 5.2.2) работы [12], можно считать, что случайные ошибки ИНС возникают в соответствии со схемой, изображенной на рис. 12.10. На схеме приняты следую-
|