Баллистика и навигация космических аппаратов
|
14.6. Планирующий спуск СА скользящего типа, наряду со многими преимуществами, имеют два принципиальных недостатка, которые вызывают необходимость создания аппаратов нового типа: однократность использования и исключительно ограниченные возможности бокового маневрирования (в пределах всего нескольких десятков км). Сущность первого недостатка лучше всего показать на примере возвращения транспортного корабля «Союз-Т». Из рис. 14.16 видно, что он включает три основных отсека: прибор-но-агрегатный (3), где размещены все приборы и основная двигательная установка; бытовой (б), где космонавты проводят основное время, работая и отдыхая, и возвращаемый на Землю отсек с космонавтами, который и есть собственно спускаемый аппарат (5). Возвращать полностью сохранным корабль на Землю энергетически и экономически неоправданно из-за огромных затрат на его теплозащиту, организацию управления, построение системы мягкой посадки и т. д. После сообщения тормозного импульса перед входом в плотные слои атмосферы происходит отделение СА от приборно-агрегатно-го и бытового отсеков. Все отсеки входят в плотные слои атмосферы, но до Земли доходит только СА, а прибор-но-агрегатный и бытовой отсеки сгорают. На заключительном этапе С А, отбросив теплозащитный экран, снижается на парашюте, а за мгновение до касания Земли срабатывают двигатели мягкой посадки. Тем не менее СА деформируется при посадке, особенно при столкновении с твердым грунтом. Выполнив задачу, корабль прекращает свое существование. Очевидно, что ни о какой многоразовости его использования не может быть и речи. 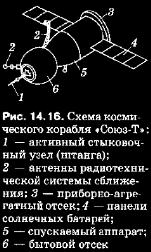 Отмеченные недостатки принципиально можно устранить на аппаратах планирующего типа, обладающих большой величиной располагаемого аэродинамического качества (К > 1). При их разработке и создании надо учитывать прежде всего два основных требования, направленных на устранение недостатков, присущих аппаратам скользящего типа: спуск должен проходить без изменения аэродинамической формы, т. е. обгар и деформация исключаются; мягкая точная посадка должна выполняться на специально подготовленный космодром. Первое требование означает, что должны быть выбраны и реализованы такие траектории, спуск по которым сопровождается умеренными максимальными температурами на поверхности СА. Это температуры, по крайней мере меньшие 1400...1500 °С, при которых современные конструкционные материалы могут работать без разрушения. Уместно вспомнить, что указанные температуры почти вдвое меньше, чем при скользящем спуске. Второе требование включает необходимость бокового маневра, так как в общем случае посадочный виток может не проходить через космодром, а создание большого числа космодромов исключено из-за огромной их стоимости и трудности доставки КА к месту старта. Удовлетворить отмеченным требованиям возможно только на КА, обладающих большими управляющими возможностями. При пассивном спуске это означает, что аппарат должен располагать как можно большим значением аэродинамического качества, т. е. поиск решения следует вести среди аппаратов самолетных форм. В целом это формальная постановка вопроса, так как фактическое решение задачи путем увеличения качества входит в противоречие с рядом других, не менее важных требований. Действительно, с ростом аэродинамического качества сильно возрастают время спуска и суммарные тепловые потоки. При прочих равных условиях максимальные температуры на поверхности КА уменьшаются по сравнению с аппаратами скользящего спуска. Но при этом надо выдерживать ряд строгих ограничений по внешним обводам КА, чтобы исключить все зоны, локальные точки, где возможна концентрация тепла, т. е. в потоке не должно быть никаких выступающих частей, острых кромок и т. п. При этих условиях облик КА представляется в виде летающего крыла, спускающегося в атмосфере с большим углом атаки, чтобы фюзеляж, кабину космонавтов и др. можно было бы разместить в аэродинамической тени. Однако на КА подобной формы очень большое значение аэродинамического качества (с учетом высказанных ограничений) получить кельма сложно. В результате возникает одна из принципиальнейших задач, связанная с определением минимально необходимого аэродинамического качества. При решении этой сложной задачи в первую очередь учитывают взаимосвязь величины гиперзвукового аэродинамического качества с максимальными температурами на поверхности КА и величиной бокового маневра. Прежде всего рассмотрим задачу определения максимально возможного бокового маневра для различных способов управления [116, 122, 123]: ► с помощью угла крена (как и аппаратами скользящего типа); ► с использованием угла атаки и угла крена («самолетное» управление). В целях упрощения считаем, что исходная орбита КА лежит в плоскости экватора и поэтому широта фк конечной точки посадки полностью определяет реализуемую боковую дальность. Тогда максимально допустимой зоной бокового маневра будет сферическое кольцо шириной 2q>K mix, где Фктах — максимально допустимое значение широты точки посадки. При значении <рк тах = 90° можно обеспечить посадку СА в любой точке земной поверхности (обеспечение требуемой долготы возможно за счет коррекции времени входа в плотные слои атмосферы). Если же точка схода СА с орбиты ИСЗ фиксирована, то достижимая область находится внутри сферического кольца, а решение задачи необходимо проводить с учетом ограничения по долготе (ограничения по продольной дальности). Некоторые результаты решения задачи определения максимального бокового удаления СА при фиксированной продольной дальности спуска представлены на рис. 14.17. Видно, что основное влияние на величину максимального бокового удаления оказывает аэродинамическое качество. Значение фк мах ~ 90° достигается при К = 3,5. Для реализации траекторий снижения получены приближенные зависимости для определения угла крена в процессе снижения: 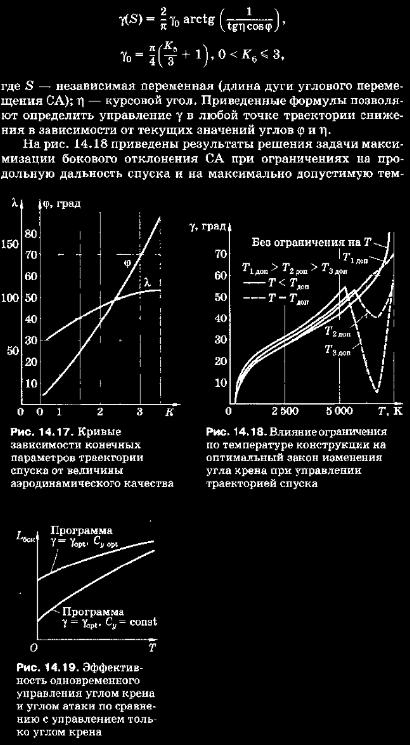 пературу конструкции. Оптимальная программа изменения угла крена очень сильно зависит от конкретного значения допустимой температуры Т . Если при отсутствии ограничения по Тдоп оптимальное значение угла монотонно уменьшается от величины уВ1ЛХ (в начале полета) до величины у = 0 (при посадке), то в момент достижения скорости полета V — 6500 м/с ограничение по температуре приводит к минимуму угла у. Анализ полученного решения показывает, что при обеспечении ymin = 0 достигается наименьшее значение допустимой температуры Тдоп mjlJ. При этом, чем меньше значение температуры Тдоп, тем меньше величина угла крена у на участке полета по ограничению (при соблюдении равенства Т = Гдоп) и тем больше значение у после схода с ограничения. Использование аппаратов, управляемых по углам крена у и углам атаки а, позволяет существенно увеличить боковое отклонение СА. На рис. 14.19 приведено качественное сравнение двух различных способов управления (только по у и по у + а). Результаты решения оптимизационной задачи показывают, что чем меньше допустимая температура, тем большее значение (при движении по ограничению Т = Гдоп), а после схода с ограничения должен обеспечиваться режим снижения с максимальным значением качества. Сравнение эффективности самолетного управления (у + а) по сравнению с управлением только по у показывает, что относительное увеличение боковой дальности тем больше, чем меньше значение допустимой температуры. Итак, теоретически можно реализовать любую боковую дальность (при величине i£pa(,n > 3,5). Но нужно ли это практически, учитывая исключительную сложность обеспечения столь большой величины аэродинамического качества. В рассмотрение должны быть приняты следующие дополнительные соображения. При запуске КА максимальная вероятность возникновения нештатной ситуации, когда потребуется возвращение аппарата на космодром, имеет место на 1-м витке полета, т. е. в пределе (посадка на 2-м витке) боковое отклонение может достигать величины меж-виткового расстояния. Это значение составляет = 2000.. .2300 км на экваторе (<р = 0) и = 1400...1600 км при ф * 50° для низких орбит (Лта)1 < 500 км). На эти цифры следует ориентироваться при выборе максимальной величины аэродинамического качества: это значение JCpacn ~ 2...1,5 соответственно. На аппаратах с указанным значением аэродинамического качества могут быть реализованы траектории с максимальным значением температуры на поверхности снижающегося КА = 1400... 1500 °С, что позволяет говорить о неразрушающейся конструкции. Реализация КА с большим значением гиперзвукового аэродинамического качества предопределила необходимость и целесообразность самолетной посадки подобных аппаратов на специально подготовленный космодром ограниченных размеров (несколько км в длину и 100...200 м в ширину). При такой посадке вертикальная составляющая скорости должна быть близка к нулю, т. е. сила тяжести должна уравновешиваться аэродинамической подъемной силой:  Нетрудно видеть, что допустимая посадочная скорость Vnc>c в значительной степени определяет требуемое значение дозвукового посадочного аэродинамического качества. Последнее зависит от размеров, формы и массы КА, но при Vnoc < 300 км/ч Каос должно быть более 3. Таким образом, опрсдслспы требования к гиперзвуковому и дозвуковому значению управляющего параметра — аэродинамическому качеству. Но это только самый первый шаг на пути решения проблемы создания аппарата планирующего типа. Итак, с баллистической точки зрения спуск аппарата планирующего типа сводят к решению двухточечной краевой задачи со свободным левым и закрепленным правым концом. С подобной постановкой задачи мы сталкивались и при решении вопросов спуска КА скользящего типа. Но здесь мы имеем два новых условия, принципиально усложняющих решение задачи. Во-первых, появляется «жесткое» ограничение на максимально допустимую температуру и, во-вторых, в конце полета (на правом конце) необходимо обеспечить не только положение объекта в пространстве (широту и долготу на заданной высоте), но также составляющие скорости и направление подлета КА к космодрому. Из этих условий следует, что параметричность задачи многократно возрастает по сравнению с аппаратами скользящего спуска, ибо в конечной точке необходимо обеспечить по меньшей мере семь координат: шесть составляющих вектора состояния, а также азимут подхода к посадочной полосе. Вместе с тем не упоминается ограничение по максимально допустимым перегрузкам. Действительно, наличие большой управляющей силы приводит к тому, что действующие перегрузки сравнительно малы практически на любой разумной траектории спуска. Практическое решение задачи несколько облегчается тем, что допускается возможность двухпараметрического управления — с использованием не только разворотов по крену, ио и по углу атаки. Отмеченные особенности обусловили стратегию выбора номинальных траекторий спуска КА планирующего типа. * Сопоставив трассу посадочного витка с положением космодрома, определяют требуемую величину бокового маневра. Возможны два предельных случая: спуск с нулевым боковым маневром, когда трасса проходит через космодром; спуск с максимальной величиной требуемой боковой дальности, когда посадка должна осуществляться не с п-го витка, проходящего через космодром, ас (п - 1)-го или (л + 1)-го витка. * Варьируя время включения ТДУ, величину и направление тормозного импульса, определяют номинальную траекторию, удовлетворяющую конечным условиям и ограничению по температуре, т. е. траектория, как правило, включает участок движения по изотерме при прохождении области максимального теплового воздействия. В процессе снижения управление должно удерживать КА на этой номинальной траектории, так как наличие ограничения по максимальной температуре резко сужает класс возможных траекторий спуска. Для решения задач навигации и наведения необходимо применять самые совершенные инерциальные системы и БЦВМ. Начальный вектор состояния КА на орбите должен определяться автономно с помощью бортовых средств или передаваться в БЦВМ с Земли. Участок снижения КА от момента включения ТДУ «до входа в плазму» можно контролировать спутниковыми системами, а после «выхода из плазмы» (при А < 45 км) — с помощью наземных станций слежения. Коррекцию бортовой инерциальной системы осуществляют как наземными средствами, так и автономно с использованием, например, различных высотомеров и дальномеров, позволяющих получать дополнительную внешнюю информацию. Учитывая исключительную сложность задачи, необходимо использовать любые приборы и устройства, повышающие надежность посадки. Следует отметить, что несмотря на все принимаемые меры, спуск по «жесткой» номинальной траектории (вплоть до прихода на космодром), как правило, невозможен, так как предъявляемые требования к конечным параметрам исключительно высоки, а за счет действия разного рода возмущений появляются отклонения от номинальных параметров. В силу этого участок снижения при решении задачи движения в плотных слоях атмосферы условно разбивают на несколько этапов: ► участок контроля максимальных температур (высота полета от 90 до =40 км), причем ограничение по температуре выполняется во всех случаях (даже если другие условия нарушаются); ► участок приведения КА к космодрому (высота полета от 40 км до 7...5 км); на этом участке температуры незначительны, и главное внимание уделяют обеспечению конечных условий выхода СА на ГЛИССАДУ — траекторию заключительного этапа посадки; ► участок движения по посадочной глиссаде. В соответствии с приведенным разделением на первом участке управление спуском автономное и автоматическое, а на втором и третьем участках может быть и автономным и неавтономным, автоматическим и ручным и даже директорным (т. е. прямым наведением аппарата с Земли с помощью аэродромных средств). Естественно, возможны различные комбинации перечисленных способов управления СА. В заключение данного раздела представим рис. 14.20, где показано изменение траекторных и управляющих параметров на траектории спуска КА планирующего типа. 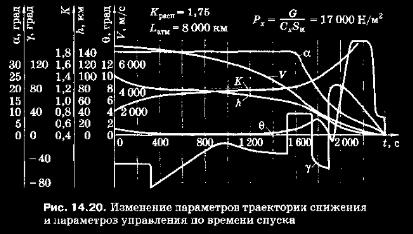 |
Случайные фотографии:






Статьи:
Видео:
Последние новости:
| Варианты внеземной жизни. Часть 2 |
| Реконструкция астероида Эрос |
| Эоархей |
| Темна энергия во облацех |
| Рентген Луны |
Видео:
 | Планета Нибиру |
| Нибиру на ОРТ |
| Hubble's Eye on the Universe |
Последние новости:
| Зонд НАСА рассмотрел ледяные горы на поверхности Плутона |
| На Землю надвигается сильный метеоритный дождь |
| NASA создаст роботов для ремонта и дозаправки спутников |
| Россия и Япония совместно построят космический телескоп |
|
WalkInSpace.Ru Правила: «Путешествие в космос» © 2025 Использование материалов допускается при условии указания авторства WalkInSpace.ru и активной ссылки на www.WalkInSpace.ru. |
|