16.6. Оптимальное управление КА на парашютно-реактивном участке спуска
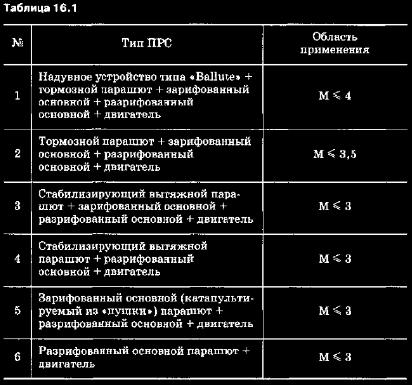
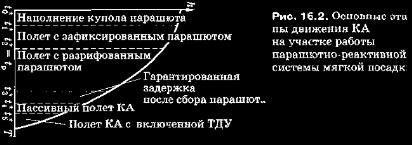
В табл. 16.1 представлена классификация типов парашют-но-реактивных систем (ПРС) и указана область их применения. Для аппаратов, осуществляющих спуск на поверхность Марса, целесообразно использовать наиболее простые типы (тип Кг 5 и № 6 в табл. 16.1) построения ПРС. При этом тип № 5 является более общим по сравнению с типом № 6, отличаясь от него дополнительным этапом — участком полета с зарифованным парашютом. В этом случае спуск КА на участке мягкой посадки рационально осуществлять по схеме, основные этапы которой представлены на рис. 16.2.
Предполагают, что введение парашюта в поток происходит в некоторый момент времени tДо момента t\ следует наддув за-рифованного парашюта. На участке от t\ до t\ проходит торможение с использованием зарифованного парашюта. Промежуток времени At* = t*2 - t\ достаточно мал, но тем не менее эффективность торможения здесь велика. В момент времени t2 происходит разрифовка парашюта, и в течение следующего временного интервала (существенно более продолжительного) осуществляется полет КА с разрифованным парашютом, в процессе которого может быть достигнут установившийся режим снижения. При этом для простоты исследований можно считать, что переходные процессы происходят мгновенно. После достижения КА некоторой достаточно малой скорости в момент времени следует сброс парашюта. Для надежности выполнения этой операции выделяется некоторый интервал времени (так называемая гарантированная задержка Atr 3 = t*t - fg), в течение которого запрещается включение двигателя. Через некоторый момент времени выбираемый из условия осуществления мягкой посадки КА, происходит включение ДУ. Программа работы двигателя аналогична вышеизложенной для участка реактивного торможения.
Для описанной схемы спуска на участке работы ПРС можно сформулировать вполне определенные требования к конечным параметрам участка основного аэродинамического торможения, ф Бели задана высота раскрытия парашютной системы, то программа управления на траектории аэродинамического торможения должна обеспечивать минимум скорости к моменту достижения этой высоты, ф В общем случае минимума массы ПРС при прочих равных условиях достигают в том случае, когда высота включения системы максимальна.
Следует отметить, что последний случай является более характерным для ПРС. Итак, сформулирован простой и наглядный критерий оптимальности для решения задачи на участке аэродинамического торможения в случае использования парашютно-реак-тивной СМП.
Выявленные в результате исследования реактивного и парашютно-реак-тивного участков снижения критерии оптимальности позволяют приступить к исследованию первого, основного участка траектории спуска КА.
|